电缆检查无人通道
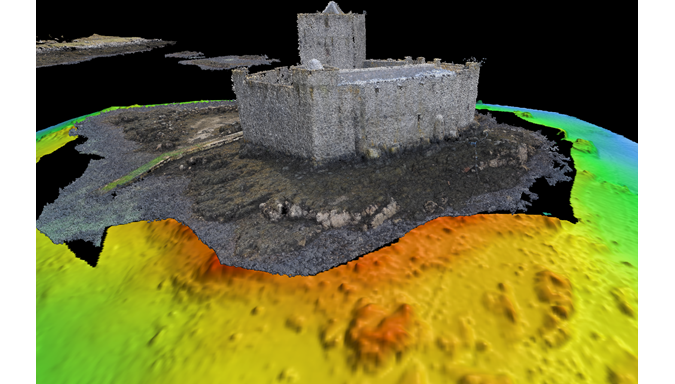
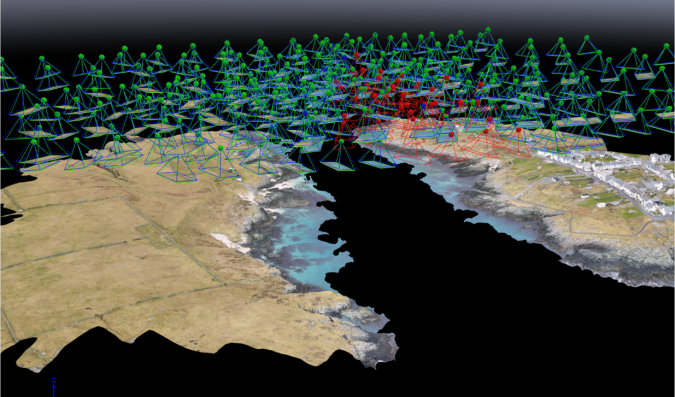
从USV和UAV调查创建3D数据集
XOCEAN最近在苏格兰大陆和西部群岛之间使用无人水面船(USVs)和无人飞行器(uav)完成了35次电缆检查。该项目地理分布广泛,作业地点在55°N至58°N之间,分布在25个不同的岛屿上。在低水位飞行的无人机和在高水位航行的usv产生了尽可能高分辨率的无缝陆地/海洋3D数据集。这个项目在六周内完成了。
两艘USV被用于完成调查活动:X-04,一艘XO-450级USV,和USV哈里。X-04是一艘4.5米长的双体船,由一个5MaH电池供电,由一个每天只使用9升柴油的小型柴油发电机供电。哈里USV是一辆250万USV,仅由3MaH电池供电。X-04用于勘测暴露的电缆和较长的电缆,而USV哈里勘测非常浅和容易接近的电缆。
X-04配备了新型Norbit Winghead i77h 0.5度多波束回声测深仪,并配备了Applanix POS MV IMU。哈里号USV装备了R2Sonic 2020多波束回声测深仪apanix POS MV IMU.Valeport雨燕在两艘USV绞车上都用于声速投掷。两艘usv都使用QPS QINSy来获取数据,并向usv的自动驾驶仪提供信息,以引导它们沿着测量线行驶。测深、后向散射和侧扫描从每个多波束系统获得。

两个senseFlyeBee X无人机,一架配备了一个S.O.D.A 3D摄像机和一架配备了AeriaX摄像机,用于获取地形数据。测深也是从无人机数据集中提取的非常浅的水,使用每秒QimeraSfM折射算法使其与USV测深相匹配。两种相机都纯粹为无人机使用而设计,分别有20 MPs和24 MPs。来自无人机的数据集使用PPK定位图像,然后使用Pix4D映射器.
方法
usv是用拖车运输的,这意味着它从一个岛移动到另一个岛非常快,最重要的是,它们不像传统的测量船那样受天气影响。这也实现了使用很少的燃料(仅4x4车辆)。usv可以部署在有遮蔽的电缆上,这意味着该项目很少受到天气停机的影响,尤其是考虑到它是在冬季进行的。

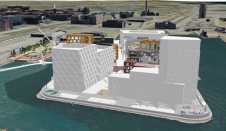
如果时间和条件允许,无人机在USV起航前飞行。UAV数据随后被快速处理以产生正射影像图和LAS文件,以显示UAV数据覆盖的范围,但更重要的是,显示USV在其调查期间要避免的危险浅层区域。UAV在一次飞行中在两个高度飞行:119米和75米。这两个图像数据集被结合起来以提供可能的最高分辨率,更高的飞行高度用于提供纵向重叠,以确保软件能够识别足够的关键点匹配。使用新的续航电池的eBee X无人机允许无人机在良好的条件下飞行大约1小时15分钟,在12米/秒的风速下飞行40分钟(它能飞行的最大范围)。如果在移动电话范围内,RTK修正实时流到无人机。这使得eBee X能够进行精确快速的处理,但似乎也让它更容易着陆,尤其是在起伏的地形上,或者从海上降落到悬崖上。
一旦无人机的数据被收集,它被放入一个三个阶段的后处理工作流。
- 原始GNSS和IMU数据在senseFly的eMotion软件包中进行后处理。
- 地理标记图像被加载到一个新的Pix4D项目中。
- LAS文件被加载到QPS Qimera中,以便与USV的多波束数据进行无缝匹配。
如果电缆埋在陆地上,就会使用无线电探测器来确定电缆的位置和埋得有多深。许多电缆都是30多年前铺设的,所以给定的位置经常是不正确的。利用这些信息和无人机的数据,测量员对电缆在水下的位置有了更好的了解。
USV在操作时启用了深度停止警报,这意味着如果深度变得太浅,USV将停止,返回到一个安全的深度,并等待陆上USV飞行员指示它下一步做什么。在测量过程中,由于最浅的部分与海岸平行,且始终处于先前的覆盖范围内,因此没有使用该功能,这确保了最安全的作业和高质量的数据。USV飞行员还可以从USV上的摄像头获得实时360度视野,AIS被集成到每艘USV的QINSy导航显示器和XO-450网络甲板中。
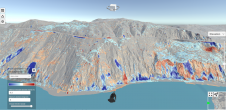
电缆RPL被用作USV的初始测量线。这也输出一个方位和交叉航向到USV的自动驾驶仪。USV飞行员调整了USV的速度,并在测量计算机的引导下沿着这条线进行观察。完成RPL和至少两条翼线后,USV与海岸平行线。当运行平行线时,QPS QINSy AutoSwath函数会根据之前的多波束条带范围(使用110%的重叠)绘制一条线,以确保USV始终高于之前的测量数据。在线测量人员一直在监测实时DTM彩色地图,当它达到一个特定的值时,它会变成蓝色。蓝色基本上是USV的安全轮廓,使数据收集安全而高效。
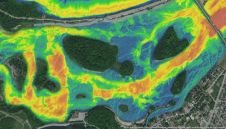
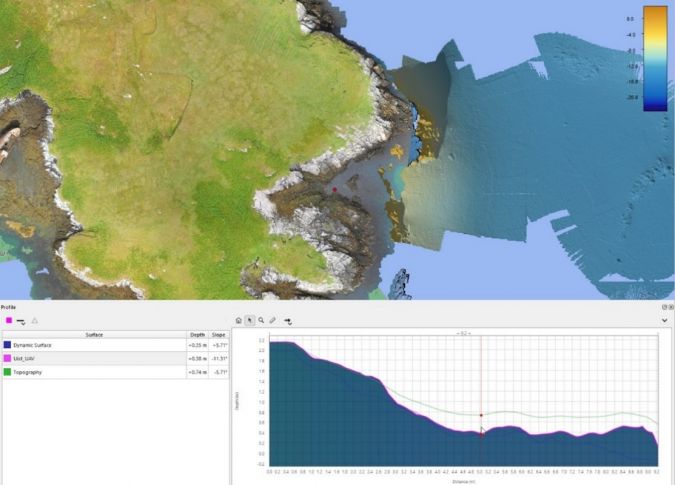
动态DTM表面
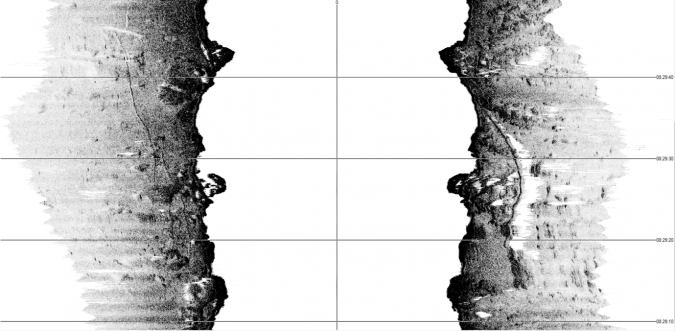
仅从水深测量的角度来看,实时检测电缆具有挑战性,因为地形本身就是岩石,在较浅的区域也有大量的海藻(海草)。然而,使用Norbit和R2Sonic多波束系统的侧扫线输出被证明是非常有效的,当电缆距离给定位置很远时,USV通过查看侧扫线显示来引导电缆。
来自usv的多波束数据被带入同一个QPS Qimera项目并独立处理。声速数据加载到采集软件中。
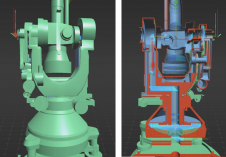
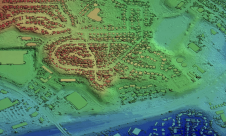
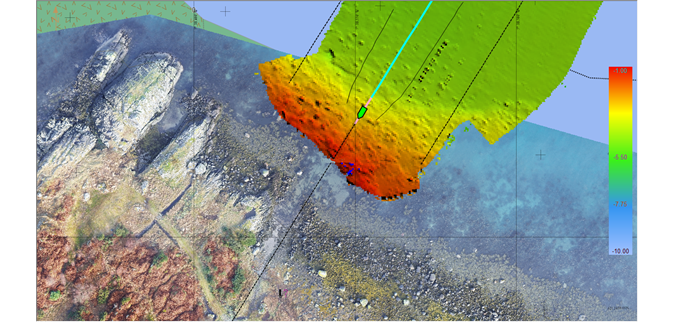
使用清洗后的多波束数据和UAV文件创建动态DTM表面。在数据清理过程中,可以同时查看两个数据集,或者通过文件着色,或者最好是通过RGB着色。这使得无人机的数据具有逼真的点云,USV的多光束数据被着色为白色,使得在这些飞溅区很容易看到什么是岩石,什么是噪音。
根据最终的清理数据,对发现的电缆进行数字化处理,发现并报告电缆附近或电缆上的任何卵石或海底特征。每条电缆都编写了一份完整的报告,包括GIS、图表、最终RPL和事件列表。
结论
使用usv和无人机进行这项调查活动不仅能够收集尽可能高的分辨率数据,而且确保调查是安全的、碳中和的和后勤效率高的。在六周的时间内,70次无人机飞行和35次USV调查是一个非凡的成就,证明了XOCEAN的无人技术是多么适合这种类型的调查。实验还证明,在浅水环境下,多波束系统的侧扫器输出效果与船体安装的传统侧扫器一样好,而不存在拖曳式侧扫器在这种水深、水流和海藻环境下运行的不便和安全问题。