通过绘制过去来预测未来
在区域尺度上推进激光雷达变化检测的极限
激光雷达变化检测(LCD)是通过时间绘制变化地形的最有效的技术之一。它可以用于耗资数十亿美元的隧道、桥梁、高速公路、铁路、管道或分区的设计、建造和运营决策,这些决策需要工程师评估地球在未来几十年的表现。预测形态变化涉及对地质学、地质过程、气候变化的深刻理解和认识,以及对过去发生过或将来可能发生的物理变化的认识。这篇文章介绍了如何利用图形处理单元(GPU)和结果的数字传递来改进LCD处理,使以前难以想象的应用得以实现。
LCD是比较多个不同时间点重叠覆盖的激光雷达数据集的数值过程。机载激光雷达扫描(ALS)液晶被工程师和geoprofessionals识别和跟踪变化的地面条件通常与地质灾害如滑坡、洪水、银行侵蚀,碎片幻灯片,沉降和落石/雪崩、堤防等资产、公路路面、桥梁、开坑和大坝。进行LCD分析通常使用以下三种方法之一:
- 数字高程模型(DEM)差分。DEM差值计算每个栅格单元上两个DEM之间的垂直变化,通常分辨率为1m。这种LCD方法是最有效和最简单的运行方式,便于在地理范围广泛的数据集上使用。然而,这种方法的结果通常比完全优化的3D解决方案精度低一个数量级(见下文第3点)。
- 基于3D点的法线或基于最短距离的差分(M3C2)。基于3D点的LCD计算两个裸地点云数据集之间的差异,沿着数据集中每个单独点的局部法线向量,或多个数据集之间的最短距离。这种方法在计算上非常昂贵,需要将ALS数据集细分为更小的区域(通常每个数据集不超过3000万个点)进行处理。这种方法在DEM差分(见上面的点1)的基础上产生了增强的结果,因为结果代表了基于点云数据的全分辨率的真实三维变化。
- 基于点或最短距离的ICP预对齐3D。采用三维变化测量的迭代最近点(ICP)预对准是对上面第2点的改进,利用先进的三维误差减少算法,在进行LCD之前减少ALS数据集之间的空间噪声。这种空间噪声通常表现为两个数据集之间的系统差异,这是由于数据收集时的地面控制和地理参考造成的。ICP过程增加了相当大的计算费用,并在处理链中使用了高级算法,在不引入进一步误差的情况下对数据进行空间调整。这是最准确的方法来导电液晶。
在应用地球科学应用的情况下,基于三维点的ICP预对齐方法以最准确的方式捕捉了变化的地面力学,考虑到由DEM差分方法产生的纯垂直变化很少能代表地面运动的真正机制,并且由于地理参照偏差而产生的误差也大大减少了。
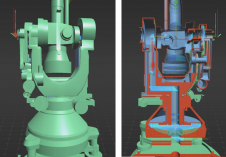
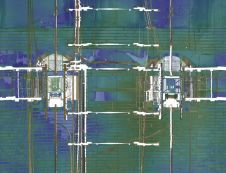
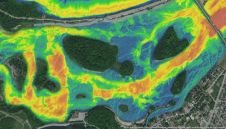
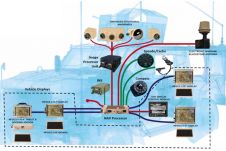
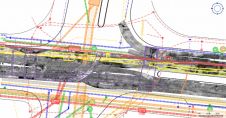
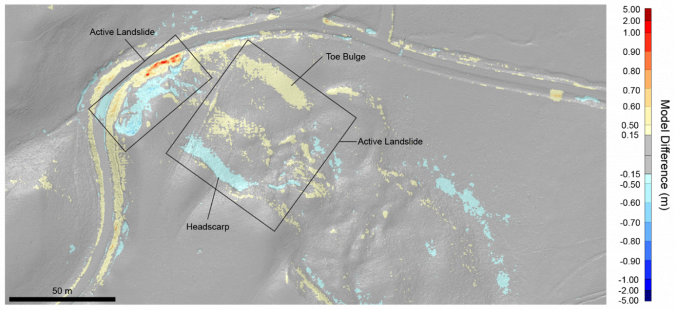
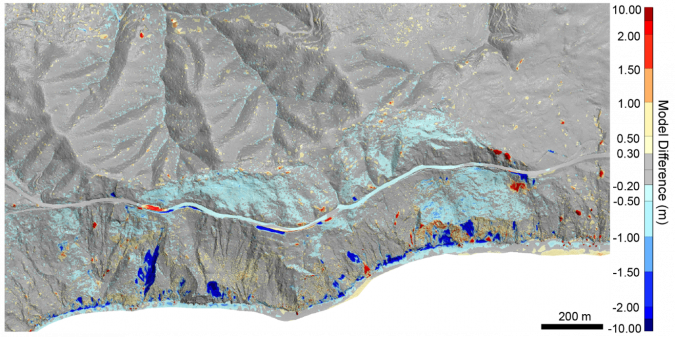
图1和图2中的示例突出的一个案件中,计算三维点云的变化检测没有ICP(图1)不允许的一个活跃的滑坡检测立即明显变化检测的结果使用ICP基于3 d点的液晶(图2)。
美国101号公路
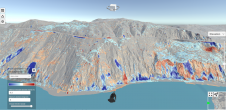
为了演示各种LCD方法和先进LCD处理的能力,加州运输部(CalTrans)沿着美国北加州101号公路在一个称为最后机会等级的区域获取的ALS数据如下。在这个位置,高速公路穿过陡峭的斜坡和海洋断崖,这些地方正在被积极地侵蚀,并参与滑坡过程。
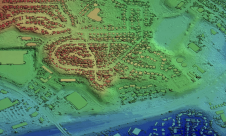
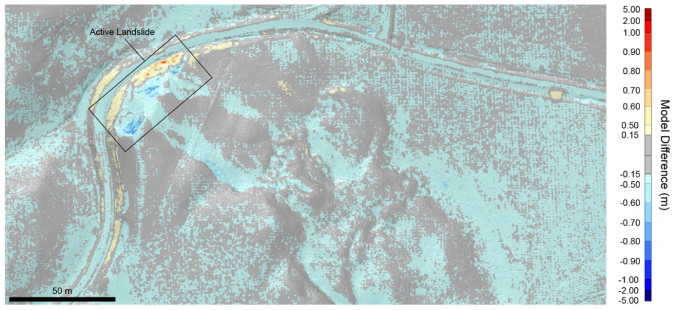
2016年和2020年采集的ALS数据的LCD对比结果如图3所示。LCD结果通常以覆盖在裸地地形模型上的彩色轮廓数据集的形式呈现。模型差异大于检测极限(LoD)通常被过滤出结果。LoD是基于95%置信区间计算的,依赖于两个激光雷达数据集之间的空间对齐质量。蓝色代表负变化区(物质损失或下沉),红色代表正变化区(物质积累、膨胀或堆积)。
从DEM-based方法转向三维点云的方法最后机会年级导致降低检测极限的3到4厘米,和使用ICP结合三维点云的方法导致了进一步降低检测极限的4到8厘米。这意味着LoD的总体减少了40%。减少错误对基础设施监视的影响是显著的,并且检测这些小更改的能力是非常有价值的。这允许所有者和工程师更快地采取行动,更积极地管理资产,以减少整个生命周期的成本。
液晶显示器的视觉和问题
图1、2和3说明了利用ICP预对齐、基于点的变化检测方法对LCD的优势。随着ALS数据的收集越来越频繁,密度越来越高,高级LCD的使用案例也越来越多。为工程师、地质专业人员和资产所有者提供一种评估和沟通大规模三维空间变化的方法,是了解过去、预测未来行为和管理相关风险的强大工具。液晶显示器的应用范围涉及多个行业和应用,如监测公路、铁路和管道网络、水库斜坡和海岸线,以及不断变化的海岸线。然而,直到最近,由于数据执行所需的计算资源,进行分析所需的主题专业知识,在特定项目现场以外的规模上应用高级数值方法(特别是上面的方法3)的能力一直非常有限,以及可视化和查询结果的数字平台。
为将3D ICP LCD从单一站点扩大到区域网络,开展了三个研发项目:
- 使用本地GPU计算着色器编写的定制3D ICP LCD算法
- 协同多用户3D环境,用于云托管LCD结果、正射影像和地形数据的分析和可视化
- 与地理空间资产管理软件集成,用于存储、访问和查询所有其他地理空间信息的LCD数据。
接下来是GPU和计算着色器的世界
在过去的20年里,gpu已经从用于3D渲染的固定功能系统发展到通用计算单元。现代gpu可以并行执行数千个运算,只要这些运算是独立的。相比之下,cpu只能并行执行几十个操作,但却能很好地处理通用代码和条件逻辑。因此,gpu在计算可以并行执行的情况下提供了巨大的速度提升。例如,深度学习和3D栅格化在GPU上得到了极大的加速,因为它们主要涉及对大型数据缓冲区中的每个元素进行独立计算。
在点云变化检测中,由于点云变化算法包含两种操作,因此实现这些速度增益比较困难:
- 计算,如:
- 求解对齐转换
- 计算法线
- 计算变化值。
- 空间查询,例如确定哪些点:
- 两朵云之间可能有对应吗
- 表示点周围的局部曲面
- 在对一个点进行变更检测时应该考虑。
通常,系统的GPU实现是通过使用nVidia CUDA等框架移植现有代码来实现的。不幸的是,对于点云处理,这种方法导致GPU实现完全受制于查询性能,因为通常用于空间查询的数据结构访问内存是随机的,并且有很多条件逻辑。事实上,相同的代码在GPU上的运行速度可能会比在CPU上慢!
建议的实现使用计算着色器来执行所有的GPU计算——计算着色器是GPU本地暴露的最低级别的代码,它提供了对执行和并行性的直接控制,用于实现高性能。作者使用了一系列的计算着色器来进行常规计算、ICP和变化检测本身。
作者还使用GPU硬件优化的计算着色器和线性数据结构在GPU上执行所有空间查询。他们的查询算法更喜欢速度和返回保守的结果,而不是返回最小的点集。在计算期间查询返回的额外点数将被拒绝。这仍然是更快的整体,因为GPU执行计算冗余点比它执行更精确的查询更快。
这些计算着色器由并行的CPU框架驱动,该框架将数据整理到GPU,处理磁盘访问,并对激光雷达格式(如LAZ)进行解压缩。其结果是,这个系统能够以数量级的速度处理数十亿点的数据集,比最快的CPU实现还要快。
可视化和协作
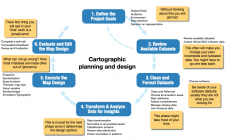
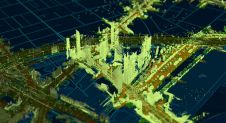
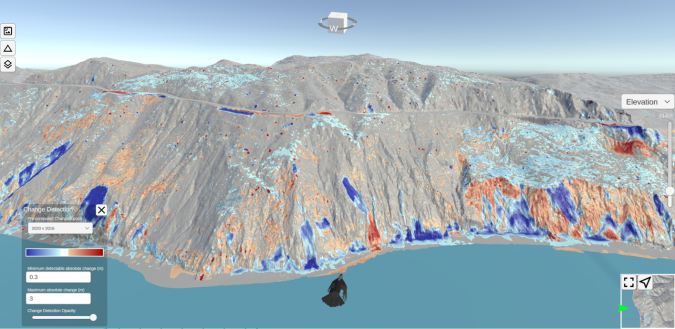
ALS数据本质上是3D的,而ICP 3D点基LCD结果最好在3D环境中进行分析。BGC开发了一个多用户协作的3D环境,允许用户在激光雷达数据和LCD结果之间“飞行”,或在地形上行走。3D环境,建立在基于unity的技术,促进了高分辨率正射影像,矢量数据和对LCD结果的动态控制的集成。图4显示了三个独立用户在协作空间中交互的视频截图。
结论
利用GPU处理在区域范围内进行基于点的ICP 3D LCD的能力,在交互式、协作的3D环境中交付结果,速度比基于cpu的处理快三个数量级以上,正在彻底改变ALS数据的可用性。在过去的一年里,BGC已经处理了40000多公里的LCD数据,为全球客户提供了数百亿的LCD数据点。能够从ALS数据中提取额外的价值,以更好地理解资产随时间变化的形态变化和行为,极大地提高了工程师做出明智决策和设计弹性基础设施的能力。
确认
作者要感谢加州运输局的Jaime Matteoli和Eric Wilson,感谢他们同意使用美国101高速公路收集的ALS数据,并展示液晶显示结果,目前专家评审小组正在使用这些数据来帮助重新设计高速公路。作者感谢BGC的Scott Anderson博士、Alex Graham、Matt Williams、Cole Christiansen和Luke Weidner在处理和解释LCD结果方面的帮助。本文讨论的方法是正在申请专利的:Application #17/371,337。