连续移动激光扫描
移动平台地面激光雷达,IMU和GPS
将地面激光扫描、定位系统和GPS接收器结合到一个移动测绘系统中,可以有效地测绘大而复杂的地形。作者在两个地点测试了移动测绘系统:一个露天矿和一条公路
Optech和Sineco已经开发了一个移动测绘系统,最初基于一个结合ILRIS-3D(智能激光测距和成像系统)、Applanix POS LV(陆基车辆)和GPS接收器的平台。该系统名为ILRIS-MC(运动补偿),可以安装在任何移动平台上,并执行快速调查,在WGS84坐标下实时生成点云。
组件
集成系统产生激光点云,通过常规扫描产生两轴扫描,用于不稳定的平台,如起重机和浮动平台,或通过连续水平和/或垂直扫描,用于移动平台。Applanix POS LV 420包含一个惯性测量单元(IMU)、三个加速度计和三个陀螺仪,用于测量计算位置、速度、加速度、方向和旋转所需的加速度和角速度。该系统还包括一个距离测量指示器(DMI),这是一个安装在车轮上的转轴编码器,用于精确测量移动的线性距离,这可以在GPS中断期间减少IMU漂移误差。车辆中的POS计算机系统是中央处理计算机,包含GPS接收器、PCMCIA驱动器、数据处理和所有POS LV组件的电源分配单元。两个双频(L1/L2) GPS接收器提供地理参考功能:一个位于永久性网络站(PNS)的地面接收器和一个移动接收器(漫游者)。采用差分GPS (DGPS)处理进行校正和细化:将漫游者的数据与地面接收器的数据结合处理。PNS通常设置在靠近测量区域的一个已知地面控制点(GCP)附近或相对于该控制点,然后用于确定GCP并在后期处理中校正移动GPS接收器数据。使用DGPS可以将GPS的精度提高到大约1cm。
集成
这三个系统之间的连接仅限于同步仪器之间的时钟。在动态模式下,每个系统独立收集数据。ILRIS-3D使用其本地时钟标记每个事件的时间,然后使用这个时间建立其本地时钟与GPS时间之间的偏移量(每秒钟重新计算一次)。在后期处理中,生成运动补偿数据只需要两个文件:(1)包含测量过程中轨迹和方向的Applanix SBET (Smoothed Best Estimated Trajectory)文件和(2)包含激光数据的Optech ROW文件,包括范围、强度、角度和时间。最终的激光点云直接在WGS84坐标下进行地理参考。为了测试综合系统的能力,该系统被安装在一辆货车上,并进行了两次勘测,一次在露天矿井,另一次在公路沿线。
露天矿
目标是调查整个矿山,计算所有库存,并计算出挖掘量。在30分钟内调查了600×500米的区域,收集了近1900万个点,分辨率约为10cm,车速为5公里/小时;低速是由于碎石路凹凸不平。为了满足要求,最终产品被下采样到50cm分辨率的点云。根据ILRIS-3D为7mm, POS为3cm, GPS为1cm三种仪器的精度计算,总体精度为4cm。利用商业软件PolyWorks对数据进行处理,进行体积计算,并在短时间内轻松提取出最终的网格和截面。
地方的路
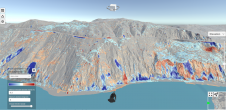
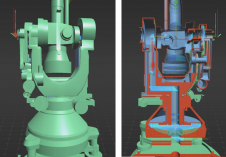
目标是获得道路周围的所有细节:路堤、路面、建筑物和其他基础设施元素,如桥梁和环岛。该系统对这条约8公里长的道路进行了30多分钟的调查,收集了900多万个积分。密度为60点/m2,车辆行驶速度为15-20 km/h。由于许多GPS间隙和道路旁边的垂直墙壁,最终的精度似乎不超过5厘米到6厘米。使用PolyWorks,结合AutoCAD和Autodesk Civil 3D对数据进行处理(图5和图6)。这导致道路绘制和道路几何图形的CAD重构,路面开裂,路面主要车辙和沥青变形,交通标志的垂直和水平位置,道路的位置和截面,如紧急停车处,隧道和桥梁,以及侧植被和墙。
结束语
实验证明了连续移动激光扫描的可行性。随着先进解决方案的出现,如最近推出的Lynx Mobile Mapper,安装和使用的便利性有望得到改善。