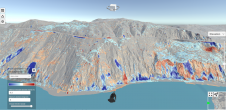
阿尔卑斯山脉
这个月我们展示了一份关于机载激光雷达处理软件(ALPS)的产品调查,见第14页,所以我将在这里简要介绍一下通常对激光雷达数据进行的操作。基本上,所有的激光雷达扫描仪测量激光脉冲击中的地形点的范围和强度,以及相应的平台定位和定位参数。第一个任务是将原始数据转换为位置-每个点的三个坐标-在一个大地测量参考系统中。结果点云是进一步处理的基础,包括过滤、可视化、分类和分析,或其他操作。
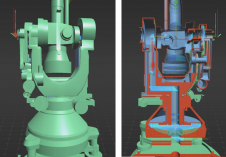
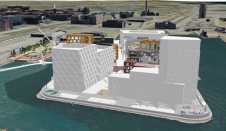
过滤是去除不必要的点,例如在创建3D城市模型时从植被中反射的点,或在创建裸地数字高程模型(DEM)时从植被和建筑中反射的点。dem属于激光雷达产品的主要类别,而ALPS例程可以生成等高线和横截面,并检测折线,通常基于早期从点云创建的不规则三角网络(TIN)。ALPS可能包含精细化的DEM模块,如计算视线、坡度、体积和模拟洪水或其他灾害。ALPS还可以自动将点组分类为建筑物、道路、树木或电线。
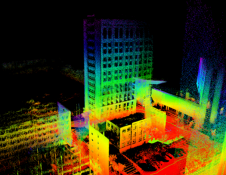
在屏幕上缩放和旋转点云,并在其中导航,对于评估数据质量、规划和控制处理中的后续步骤,以及编辑手动选择单个点至关重要。基本上,点可以表示为黑色背景上的白点,但通常它们是根据强度或使用联合注册图像的纹理着色。展示结果可能需要一些设施,如遮阳、漫射照明、多层、高度着色或在点云上空的航空航天图像的自动悬垂。良好的可视化也是必要的,通过一组选定的点特征,如线,圆,平面,球体,圆柱体和圆锥。选择设备可以测量线连接点的距离和角度。一些ALPS支持使用图形硬件进行立体点云查看。
激光雷达扫描由于其采集特性,会产生不规则分布的点。许多数学运算的实现,如面积和体积的计算,需要数据排列在一个正方形单元格的网格上。网格插值要求;常见的有最近邻法、逆距离加权法、克里格法和多项式拟合法。处理后,ALPS的输出通常会被导入其他软件,通常是GIS。由于存在许多数据格式,所以重要的是任何ALPS都支持各种各样的导入和导出格式,这可以将数据导入到ALPS本身,也可以将输出导入到其他系统。