Vegetation Mapping Using Multispectral UAV Images
绿色区域管理的宝贵数据来源
DJI最近引入了P4 MultiSectral,这是一种高精度无人驾驶汽车(UAV或“无人机”),该飞行器利用了多光谱摄像机的整合以促进农业和环境监测应用。因此,植被映射的图像数据收集现在比以往任何时候都更简单,更高效。
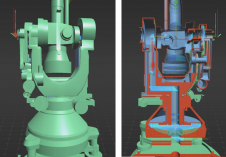
In the DJI P4 multispectral, images are collected by an RGB camera and a multispectral camera array with five global shutter cameras covering blue, green, red, red-edge, and near-infrared bands at a resolution of 1,600 x 1,300 pixels (Figure 1). Real-time, centimetre-accurate positioning data on images captured by all six cameras within DJI’s built-in system is used to align the flight controller, RGB/multispectral cameras and RTK module. This fixes the positioning data to the centre of the CMOS and ensures that each image uses the most accurate metadata. All cameras benefit from the calibration process whereby radial and tangential lens distortions are measured and saved into each image’s metadata to ease post-processing of the images.
更重要的是,无人机顶部的集成光谱传感器可捕获太阳辐照度,以最大程度地提高数据收集时间的准确性和一致性。这可以实现最准确的NDVI结果。

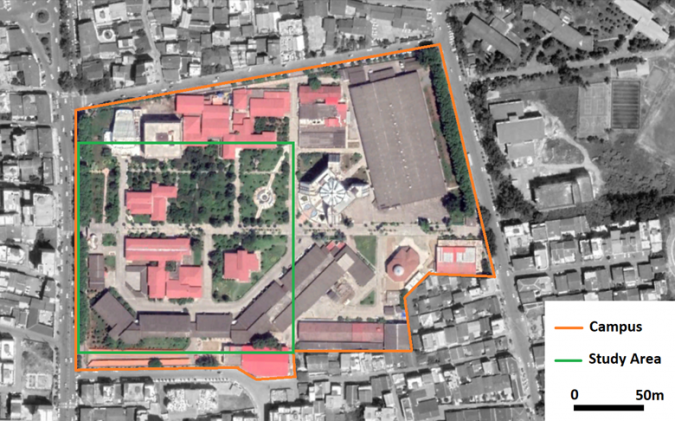
Study area and data collection
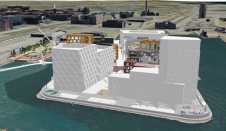
Babol Noshirvani University of Technology (BNUT), which is the leading university in Iran according to the Times Higher Education World University Rankings, is located in north of the country. The campus comprises 11 hectares of several buildings and a green area which is mainly covered by orange trees (Figure 2).
该数据集于2020年10月24日收集。该航班计划在DJI GS Pro iPad应用程序中,高度为70米,向前和侧面重叠65%。图像收集是在中午完成的,以最大程度地减少阴影,并且用522个地理标记的垂直RGB和多光谱图像覆盖了大约十分钟的校园。
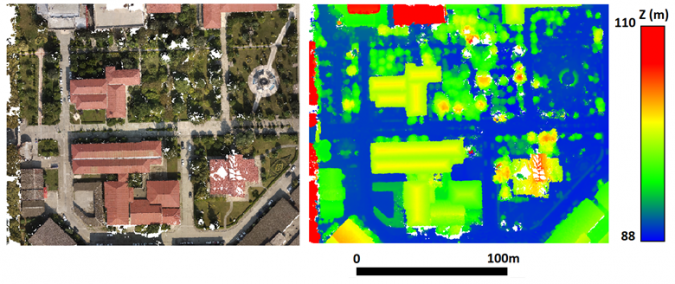
Data processing
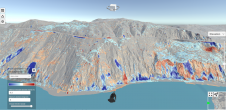
使用UAV图像的摄影测量处理是使用的AgisoftMetashape software. The processing workflow – including image alignment to produce sparse point clouds, build dense cloud, build mesh, build texture, build the digital elevation model (DEM) and build the orthomosaic – was performed and lastly, to generate a 3D map of the study area, the multispectral point clouds and orthomosaic were exported in (.las) and (.tiff) formats, respectively. The 3D point cloud with a density of 900 points/m² and orthomosaic with a ground sampling distance (GSD) of 3 centimetres were generated from the point clouds and the images (Figure 3).
结果
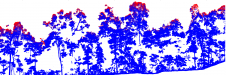
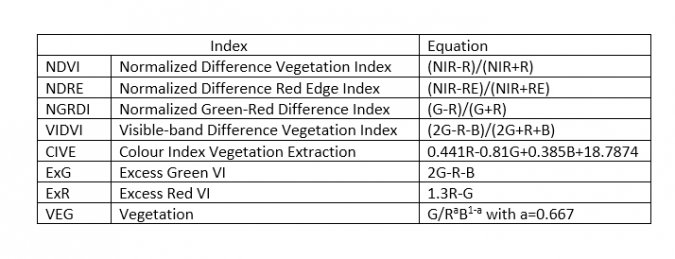
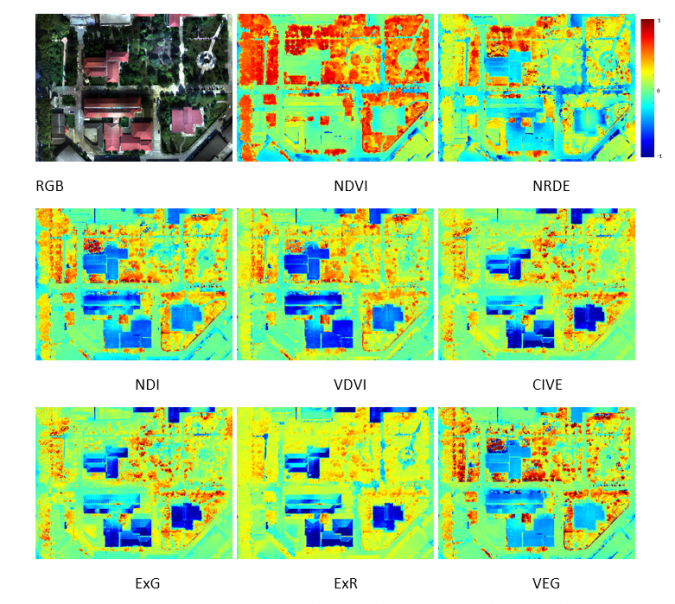
如表1所示,使用UAV图像的摄影测量处理得出的多光谱正交原状体来计算植被指数。和蔬菜被利用。研究区域的相应植被指数图如图4所示。
Although trees and lawns are highlighted by all vegetation indices, vegetation areas are more distinguishable by NDVI. Additionally, buildings and non-vegetated areas are clearly highlighted by all indices. The NDI and VEG indices provided similar results and outperformed other visible-band indices. The CIVE, VDVI, ExG and ExR indices are sensitive to shadows. As a result, shadow areas are highlighted as vegetation.
Conclusion
多光谱无人机图像可用于许多应用程序,例如城市树制图,园艺,精密农业等。除了开放应用新时代的应用外,RGB衍生的植被指数还可以使用多光谱的无人机图像进行校准和验证。结果,基于无人机的RGB图像将是城市和农村地区绿色区域管理的宝贵数据来源。
Future reading
McKinnon, Tom, and Paul Hoff. Comparing RGB-based vegetation indices with NDVI for drone-based agricultural sensing.Agribotix。com21.17(2017):第1-8页。
Yeom,Junho等。从无人机数据得出的植被指数的比较,以分化农业的耕作影响。遥感11.13 (2019): p. 1,548.
Starý,K。等。比较来自无人机图像的基于RGB的植被指数到估计啤酒花冠层区域。Agronomy Research18.4 (2020): pp. 2,592-2,601.
Acknowledgements
作者要感谢Roodkhiz Water and Environment Company收集了无人机图像。