点云处理时间边界的移动
与处理点云相关的时间问题非常令人沮丧,但这并不是什么新鲜事。《科学》杂志的技术编辑hubert - jan Lekkerkerk说,不断变化的界限意味着我们注定永远在玩等待的游戏188金宝搏特邀他在最近的专栏中写道。
尽管我是一名专业的水文测量员,但我非常理解地理空间测量员对点云的看法。你可能知道,水道学主要是测量深度,也就是“水深测量”。自从20世纪90年代进入该行业以来,我一直从事被水文测量师称为多波束测深的工作:激光雷达测高的水下变体。我使用的第一个仪器是一台Reson 9001,每次测量可以给出60个深度(“束”),大约每秒15束。换句话说,它大约每秒产生900个深度。如今,这种系统可以达到每条带1000个深度,每秒60个深度,总计每秒60000个深度。但在当时,就处理而言,即使是每秒900个深度也构成了一个大问题。如果使用8MB内存的Pentium 75处理器(这在当时是最先进的!),一天的调查可能需要半天的时间。数据传输使用4速cd - rom或500Mb的便携式硬盘。
虽然数据是作为点云收集的,但我们不能这样处理它,所以使用1x1m的网格2例如,Bin网格-即使这样,有时也会对计算机征税。在世纪之交,我和一个软件供应商进行了一次讨论,他告诉我,他的软件可以毫无问题地处理大数据集。我回答说,我们的项目需要进行20分钟的调查,使用的系统可以提供256个深度,每秒40个深度。换句话说,一个小的调查将产生超过1200万个需要可视化的点。奇怪的是,我再也没有听到过那个小贩的消息……!
如今,多波束回声测深、激光雷达或摄影测量技术使这些数字显得可笑。我们现在的优势是,计算机的速度更快了,数据存储的规模更大了,而且价格更便宜了……但问题还是一样的。例如,就在几周前,我让一个学生准备一个关于摄影测量学的报告。因为很多大学生在海道测量的从他们的实习回来解释他们如何增强水文调查与无人机数据连接土地和水的部分,我们刚买了我们的第一个A1-class无人机仅12 mp摄像头和基本GPS / Glonass /伽利略。这个特殊的学生在他最近的港口扩建项目实习期间做了许多这样的调查,甚至获得了他的无人机飞行员执照。因此,为了演示处理工作流程,他对学院附近的一个码头进行了调查。他以1200万像素拍摄了大约140张照片,创建了一些地面控制点,他使用学院的RTK系统进行测量,并开始处理他的小(最大)。30分钟)的调查。他最终得到了一个令人印象深刻的大约1200万点的3D模型,但这只是在相当长的等待之后(尽管不到半天)。现在和20年前的主要区别是,他不需要最先进的电脑,而是使用自己值得信赖的游戏笔记本电脑。
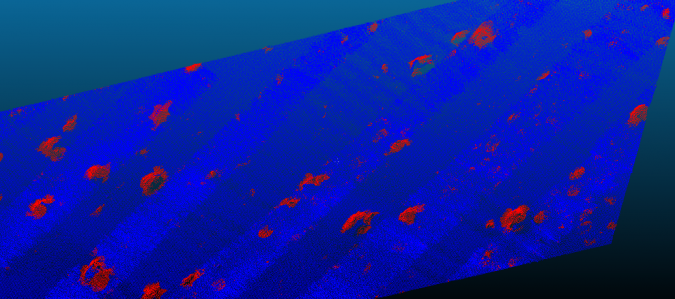
我曾安排我的一个本科生给同一个班级做客座讲座。他目前的论文工作是使用人工智能(AI)探测多波束回声测深仪点云中的巨石,他已经用Python构建了一些软件,现在正在评估他的工具的准确性。他获得了一个包含数百万个数据点的数据集,并将其分解为一个训练集和一个“常规”集。在客座讲座中,他要求学生们帮助他验证他的软件的准确性,通过使用水文测量QPS Qimera云处理软件手动“点击”他们认为是巨石的东西。在他们的常规游戏笔记本电脑上,他们花了大约15分钟来完成整个数据集。然后,他在10%的数据上运行他的(未优化的)软件,因为这是他的计算机一次最多能处理的数据。跑了大约五分钟。除了发现他必须一边看着状态条慢慢前进,一边填补五分钟的课堂空白之外,他还证明,即使在今天,在点云上进行精细处理也需要时间。
总之,与处理点云相关的时间问题已经存在了几十年,每当我们认为我们即将赶上时,边界又会发生变化:新的传感器、新的要求或新的工具。唯一的解决办法是在“可接受的”处理时间和客户满意度之间寻求平衡。在处理点云数据时,我们似乎注定要永远玩等待的游戏……