Underwater Deadwood and Vegetation from UAV-borne Topobathymetric Lidar
无人机和激光雷达传感器技术进步的好处
由于社会经济和生态的重要性,对淹没的枯木和植被的监测正在受到越来越多的关注。戴德伍德(Deadwood)充当重要的水下栖息地,但也对桥梁,水力发电厂和河滨建筑构成威胁。反过来,水下植被又是一般气候变化,尤其是全球变暖的代表。在这种情况下,无人机 - 植入的topobathymetric激光扫描构成了一种有前途的工具,可用于准确捕获和建模这些小规模对象,以高空间分辨率。
自然河流周围的冲积森林构成了生态上重要和敏感的栖息地。季节性的洪水将枯木带入活跃的河道,在该通道下游,直到自然或人造障碍物(河弯,桥梁,水电站等)阻止其移动。这种滞留的浮木在水生生态系统中起着重要作用,例如作为少年鱼阶段的庇护所,但原木果酱也会损害基础设施和居民区。除了枯木之外,对沿海植被的监测(即淹没的植被至阳光可以穿透以支持光合作用的深度)越来越引起人们的兴趣,因为这种植被充当了气候变化的代理。淹没的大植物植被以非常敏感的方式对升高水温和其他全球变暖引起的其他参数的反应。因此,从生态和社会经济的角度来看,对河流和湖泊渠道以及沿海植被中浮木的体积和分布是一个重要主题。
改变游戏规则
topobathymetric Lidar是绘制沿海和内陆水域沿海区域的既定工具。测深痛在电磁光谱的绿色结构域中使用短激光脉冲来测量地下水位上方和下方的物体。与使用红外激光辐射的地形传感器相比,测深传感器采用大型光束发散,这导致典型的足迹直径在约50厘米的范围内,可从载人平台获取数据获取。但是,这会阻碍淹没的原木和分支的可检测性,尤其是对于小于30厘米的茎直径。无人机 - 植入的topobathymetric激光雷达传感器的出现从根本上改变了这种情况,因为这些系统提供的小型激光足迹直径约为10厘米,高激光脉冲密度> 200点/m/m2。
在这个艺术icle, we present the early results of detecting and modelling submerged driftwood and vegetation based on 3D point clouds acquired with a survey-grade UAV-borne topobathymetric laser scanner. We demonstrate that stems, branches and littoral vegetation are recognizable in the point cloud. The achievable point density and measurement precision furthermore allow the derivation of relevant parameters such as the length and diameter of driftwood logs and the vegetation height of macrophyte patches. This enables the quantitative analysis of submerged biomass at a high spatial resolution.
Sensor
The RIEGL VQ-840-G is an integrated topobathymetric laser scanning system including a factory-calibrated IMU/GNSS system and a camera, thereby implementing a full airborne laser scanning system (see Figure 1). The lightweight, compact VQ-840-G Lidar can be installed on various platforms, including UAVs. The laser scanner comprises a frequency-doubled IR laser, emitting pulses of about 1.5ns pulse duration at a wavelength of 532mrad and a pulse repetition rate of 50–200kHz. At the receiver side, the incoming optical signals are converted into a digitized electrical signal. The laser beam divergence can be selected between 1–6mrad to allow a constant energy density on the ground for different flying altitudes and therefore balancing eye-safe operation with spatial resolution. The receiver’s iFOV (instantaneous field of view) can be chosen between 3 and 18mrad. This allows the balancing of spatial resolution and maximum depth penetration.

vq - 840 g雇佣了一个背包的帕尔默扫描仪es a nearly elliptical scan pattern on the ground. The scan range is 20° x 14° along the flight direction, which means that the variation of the incidence angles hitting the water surface is low. Onboard time-of-flight measurement is based on online waveform processing of the digitized echo signal. In addition, the digitized waveforms can be stored on disc for offline waveform analysis. For every laser shot, echo waveform blocks with a length of up to 75m are stored unconditionally (i.e. without employing prior target detection). This opens up possibilities such as waveform stacking, variation of detection parameters or waveform analysis algorithms. The depth performance of the instrument has been demonstrated to be in the range of more than two Secchi depths for single measurements.
研究区域和数据集
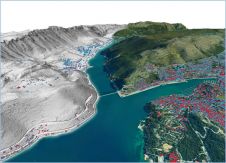
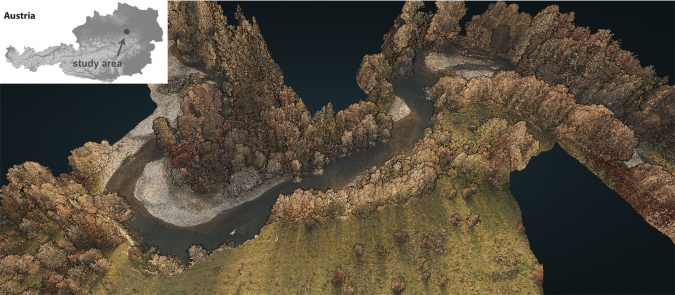
The study area is located at the tailwater of the pre-Alpine Pielach River, a tributary of the Danube River in Lower Austria. The study site is located in a Natura 2000 natural conservation area and the gravel bed river features a meandering course with frequent geomorphic changes in response to flood peaks. The mean width of the river is around 20m with a mean annual discharge of 7m3/s and a maximum depth of around 3m, allowing full coverage of the entire river bottom with topobathymetric Lidar. Alluvial vegetation (trees, bushes, shrubs) often reaches from the shore into the wetted perimeter, leading to the frequent input of wooden debris into the river. In addition, larger flood peaks transport driftwood logs from upstream into the study area, where the logs often remain for a longer period before drifting further downstream with the next flood peak.
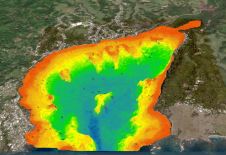
The subsurface of the adjacent flood plain is dominated by river gravel, which was quarried in the past, leaving around a dozen groundwater-supplied ponds with a maximum depth of 5.6m and featuring patches of underwater vegetation. The occurrence of complex bathymetry as well as the presence of submerged driftwood and littoral vegetation makes the site an ideal study area for UAV-borne topobathymetric Lidar.
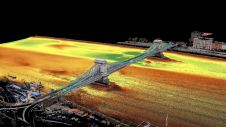
最近,该地区对RIEGL VQ-840-G进行了两次调查。2021年11月,扫描仪安装在地面高度50–60m的八杆摩托车上,梁发散为1-2Mrad,可提供约1DM的足迹直径,脉搏速率为50kHz和200kHz。同时基于无人机的摄影测量飞行任务是为激光点云着色的基础(见图2)。2022年2月,将同一仪器安装在直升机平台上。虽然无人机的采集的目的是最大的空间分辨率来检测淹没的原木和分支,但直升机整合的焦点是最大化渗透深度。因此,将5MRAD的较大光束发散与9Mrad的接收器FOV一起使用,并在被调查的池塘的底部覆盖范围以及额外的植被高度。
方法和结果
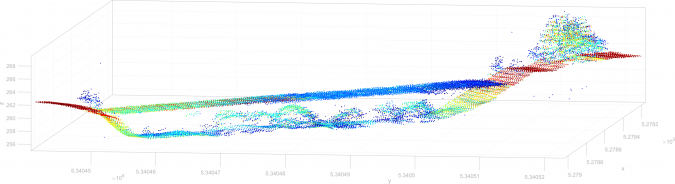
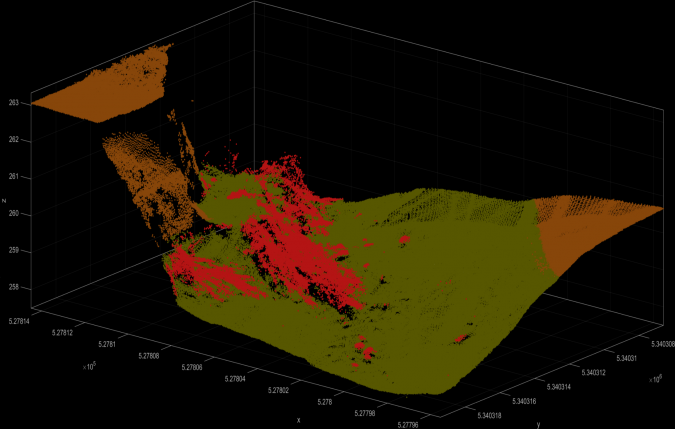
处理管道主要遵循标准的测深激光雷达工作流程。在带状对准和地理发作之后,我们对所有空气水接口激光反射的连续水表面模型进行了建模,并对原始测量进行了运行时和折射校正。校正点是推导DTM(裸露地面 +浸入底部)的基础。此外,所有其余水柱点的体积密度密度使水下植被自动分类。视觉分析揭示了两类淹没的植被:(i)单个宽树茎和(ii)一束较小的树枝和植被斑块。
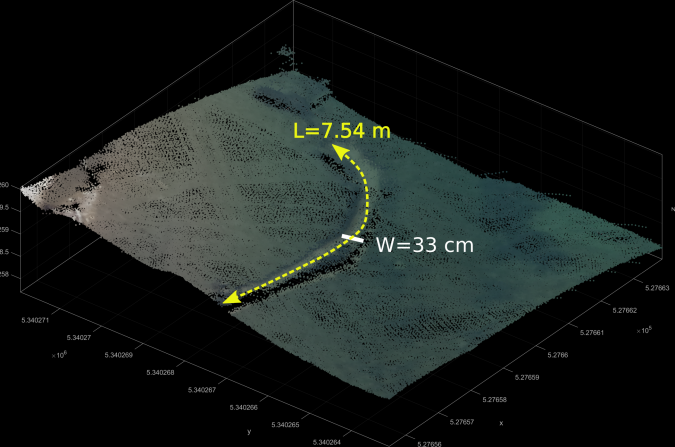
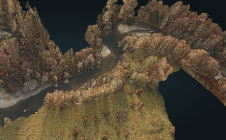
图3显示了由RGB着色的大个子茎的3D点云,图4具有整个柳树的许多薄树枝,并通过分类为颜色。这两个示例都证明了(i)检测和(ii)从无人机培养基上伴置量云中自动对水下植被进行分类的可行性。图3a中茎的长度和宽度分别为7.54m和33厘米。与在干燥森林中的枯木相反,淹没的浮木通常更稀疏,缺乏地下室会促进检测。另一方面,激光信号在水下的正向散射会导致点云的模糊,这使自动检测密集的小结构(分支)自动检测以及由于浸入浸入式浮木点的逐渐扩大而增加的植被斑块的精确估计,随着浸入式浮木点的逐渐增加而增加水深。淹没大植物植被的斑块如图5所示。
Conclusions and Outlook
无人机和激光雷达传感器技术的进展正在使淹没地形的捕获以及详细的枯草和淹没植被等复杂特征的检测。无人机 - 传播的顶膜法传感器具有约1MRAD的激光束发散,在高度约为1毫米。50m提供了次级激光足迹直径。加上200kHz的高脉冲重复速率和5-6m/s的慢速飞行速度,这导致点密度超过200点/m2,,,,and thus very high spatial resolution. Furthermore, sensors featuring user-definable beam divergence, receiver’s field of view and scan rate make it possible to balance depth performance and spatial resolution.
Based on the automatic classification of 3D points, it is now possible to quantify parameters of submerged deadwood (stem length and width) and littoral vegetation (vegetation height and volume). Further improvements to the processing pipelines are subject to future research. The focus is on gaining a better understanding of the interaction of green laser radiation with water and multiple small-scale objects within the laser’s line-of-sight to improve established full-waveform processing techniques to handle these complex target situations. Other topics of interest include improving the automatic classification of submerged driftwood, vegetation and the water bottom, the segmentation of individual deadwood logs, the characterization of littoral vegetation, and the independent accuracy assessment of derived metrics.