开发用于培训和研究的虚拟激光扫描仪
VRSCAN3D:陆地激光扫描模拟器
VRSCAN3D项目已经开发了一个虚拟的陆地激光扫描仪模拟器,作为支持激光扫描过程的训练工具。它旨在使用有限或无法使用实际陆地激光扫描设备的大学和其他团体使用。该虚拟解决方案也与教学的数字化趋势非常吻合,这已经由COVID-19的大流行加速。该项目由德国学术交流服务(DAAD)资助。
数字化是全球趋势,几乎影响着每个行业。当然,在地理空间行业中也有许多迹象,而且在教学领域也有很多迹象。正在进行的Covid-19危机表明,教学的数字化不仅是一种选择,而且是当前现实中必不可少的必要性。大流行特别影响了那些不可避免的课堂教学的学术课程,例如在需要使用测量设备的实用课程中。因此,最近在教育方面的关键状况加快了向在线教学的过渡。
除此之外,学术机构有责任按照专业市场和行业的当前需求和需求来教育学生,包括如何使用最新技术并执行后续数据处理。但是,如今的激光扫描仪通常每台设备的价格在15,000至80,000欧元之间。这使得某些教育机构(尤其是在较不发达国家)很难为培训目的提供此类设备。在这种情况下,虚拟系统可以提供具有成本效益,灵活和面向未来的解决方案。
VRSCAN3D功能
已经设置了VRSCAN3D项目,以开发虚拟激光扫描仪和相关的培训概念,以支持有限或无法访问实际陆地激光扫描(TLS)设备的大学和用户组。VRSCAN3D模拟器的主要目标群体是地球,遗产,建筑和其他相关高等教育部门的学生和老师,访问昂贵的TLS设备的途径有限。虚拟工具允许在TLS现场工作阶段模拟所有过程,并生成与现场实际扫描仪生成的数据相当的结果。这些结果可以在常见的软件包中进一步处理,类似于实际的测量实践。

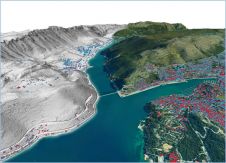
使用到目前为止开发的VRSCAN3D模拟器,可以创建现实的环境方案,从而在很大程度上满足实际项目的要求。用户可以交互方式移动化身,定义测量站和目标,选择及其各自规范的不同扫描仪类型并使用自定义设置。在模拟过程中,横梁的角网格从扫描仪的中心投射出来。每个光束与最接近表面的交点给出离散点坐标。这些充满噪声和强度值。最大表面搜索范围仅限于扫描仪的范围规范。该仿真导致以不同的文件格式的结构化3D点云导入进一步处理软件。对于每个扫描站,在本地扫描仪坐标系中生成一个点云。此外,可以创建并集成到模拟器环境中的现实世界对象的3D模型/数字双胞胎(例如建筑物或站点)(图1)。
技术细节
VRSCAN3D已在虚幻引擎内开发,因此用户的计算机必须与其最低要求兼容。主模拟器功能由虚幻引擎的蓝图视觉脚本系统编程。这使系统非常灵活,并允许修改软件模块,而无需重新编译整个代码。由于蓝图限制并改善软件的整体性能,因此在C ++语言中编程了一些模块。虚拟环境3D模型(以IFC格式)使用Datasmith插件导入虚幻引擎。

产品功能包括以下功能:
- 选择将要模拟的扫描仪模型
- 激光扫描过程仿真以根据扫描仪规范和对象材料获得具有强度和噪声值的点云
- 扫描站管理,允许用户为每个扫描站指定设置(分辨率),并创建,移动和删除站点
- 目标管理允许放置和去除不同类型的目标(棋盘和球形)
- 项目管理,该项目允许项目保存以延续以后
- 批处理扫描,即同时放置多个扫描站,并触发所有站点的扫描模拟
- 扫描过程和生成点云的实时可视化
- 以标准文件格式导出点云,以进行后处理
- 球形全景图像产生。
与现实生活中的扫描不同,速度主要取决于物理学,模拟的速度取决于几个因素,即:
- 计算能力
- 环境开放
- 存在反射或折射激光束的表面
- 噪声模拟。
计算能力直接影响扫描速度;更快的CPU和GPU提供更快的模拟。同时,模拟器不需要大量的内存,因为模拟点短时间存储在RAM中,然后直接写入磁盘。根据扫描设置和环境,内存消耗通常为0.5-3GB。对于开放环境,模拟也更快,因为当激光束未碰到表面时,计算的数量会大大减少。反射表面的存在减慢了模拟速度,因为这需要对反射激光束和强度的其他计算。由于范围和角噪声的模拟需要非常简单的计算,因此其对扫描速度的影响小于1%。

虚拟扫描过程
到目前为止,已经实施了基本的通用扫描仪和三个商业扫描仪模型,并且将不断扩展实施的扫描仪列表。对扫描仪设置的访问是通过所选扫描仪模型的现实接口实现的(见图2)。用户可以选择扫描参数并更改仪器高度(默认情况下设置为1.60m)。也可以更改扫描位置或卸下站。
模拟器提供了两种工作场景:
1)用户在虚拟环境中导航,并在现实生活中选择和定位目标位置。然后指定扫描仪位置和扫描设置,并启动虚拟设备的扫描过程(图3)。Point-Cloud集合的进度由投影扫描仪横梁实时可视化。扫描完成后,用户头像“进入”下一个站。

2)用户在虚拟环境中导航,并为所有目标和所有扫描站选择位置。随后,分别为所有站点或每个电台指定扫描设置。最后,以批处理模式为所有站点启动了扫描模拟。
在该软件的最新版本中,噪声和强度仿真是根据数学和物理模型实现的。由于可为3D场景模型的每个部分提供模拟材料属性(在建模期间指定),因此噪声和强度是材料特性,扫描仪规范和反射属性的函数。该软件的最新版本还模拟了激光束传播和来自玻璃和其他高度反射表面的反射(图4和5)。
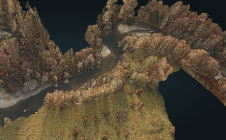
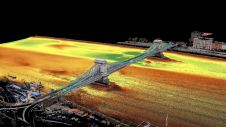
占用/模拟覆盖虚拟对象的尽可能多的站点之后,将数据存储为硬盘驱动器上的文本文件(TXT或PTX)。E57格式将在不久的将来提供。可以在数字环境中模拟整个扫描序列,从而生成逼真的扫描数据,以后可以在整个数据处理链中处理,注册和使用(图6)。

结论
可以得出结论,vrscan3d:
- 提供有用的3D激光扫描可视化,可用于动手说明如何使用TLS设备
- 易于操作,并提供现代游戏环境的所有性能
- 帮助用户学习基本的陆地激光扫描参数和接口使用情况,并且对于计划单个工作流程很有用
- 允许生成模拟扫描数据与真实数据相当,包括噪声,强度,全景图像和反射
- 如果无法使用实际设备(例如,由于费用),可以替换现实生活中的实用培训工具
- 是远程学习课程,电子学习和在线教学的有用工具
- 可以通过创建地面真相扫描数据来用于研发
- 提供营销扫描仪产品的新选择。
VRSCAN3D可作为免费演示版本提供,可提供通用扫描仪型号和有限数量的扫描站。具有不同扫描仪模型和无限功能的完整版本将在适当的时间内使用。

进一步阅读
Chizhova,M.,Popovas,D.,Gorkovchuk,D.,Gorkovchuk,J.,Hess,M.,Luhmann,T.,2020年:虚拟陆地激光扫描仪教学环境数字化数字化模拟器:概念和首先结果。int。拱。摄影。遥感空间信息。科学。,XLIII-B5-2020。https://doi.org/10.5194/ISPRS-Archives-Xliii-B5-2020-91-2020
Chizhova,M.,Gorkovchuk,D.,Kachkovskaya,T.,Popovas,D.,Gorkovchuk,J.,Luhmann,T.,Hess,M.,2021年:对先进的Terrestrial Laser Laser Scanner Simulator的定性测试反馈。int。拱。摄影。遥感空间信息。科学。,43,29-35。https://doi.org/10.5194/isprs-archives-xliii-b5-2021-29-2021
Popovas,D.,Chizhova,M.,Gorkovchuk,D.,Gorkovchuk,J.,Hess,M.,Luhmann,T.,2021:数字双胞胎环境中的虚拟陆地激光扫描仪模拟器。联合国际活动的会议记录9ThArqueológica2.0&3路西班牙瓦伦西亚的地理。https://doi.org/10.4995/arqueologica9.2021.12091