背包里的激光扫描仪
向全地形个人激光扫描仪的发展
激光扫描系统在过去十年中经历了重大的发展。在机载激光扫描仪(ALS)的初步突破之后,其他类型的激光扫描系统也出现了,最显著的是地面激光扫描仪(TLS)和移动激光扫描仪(MLS)。虽然这三种主要类型的激光雷达系统一起服务于大量的应用,但没有一种能够在具有挑战性的位置、崎岖的地形和复杂的城市结构中进行快速和灵活的扫描。个人激光扫描仪(PLS)填补了这一空白,现在正朝着这一方向发展用于映射复杂环境的紧凑,敏捷和灵活的解决方案.本文解释了新的Akhka R2 PLS,并举例说明其在各种应用中的使用。
(作者Antero Kukko、Harri Kaartinen和Juho-Pekka Virtanen,芬兰)
需要新的3D数据收集工具
许多应用程序需要对象及其周围环境的3D数据。在土木和工业工程、道路建设和维护、城市规划、环境分析和精密林业等领域都可以找到这样的例子。多年来,激光雷达被广泛应用于扫描物体或三维环境地图,以支持这些应用。ALS、TLS和MLS类型的激光雷达系统各有其各自的应用和优缺点。然而,在某些情况下,这些激光雷达系统都不能使用。例如,栅栏、路缘或通道的方向可能会阻止MLS进入,或者地形可能太粗糙或空间限制太大。另一方面,TLS可能适合于地形,但可能由于视点数量有限和扫描注册需要过多的数据冗余而不充分。因此,建模和监控对象的需求越来越大复杂的环境正在挑战行业开发更完整、更准确、更高效的3D数据收集工具。
重型原型,但容易粗糙的地形
对于大型地貌地貌调查的敏捷场MLS的需求是在本文中描述的叫做Akhka的背包移动激光扫描系统的开发背后的驱动力。该PLS基本上具有与MLS类似的映射能力。Akhka PLS的第一个原型于2011年初建于2011年初,它在芬兰北极地区运行,用于映射点杆(内部弯河沉积物)和帕尔萨地貌(北极霜冻海卷)。原型被证明是功能性的,进一步改善的良好起点。然而,一个特征仍然需要大量关注,是系统的重量,因为它太重而无法舒适地长时间佩戴。尽管如此,运营商可以轻松完成两到三小时的映射在松散的沙滩和坚固的地形上运行。
Akhka修订
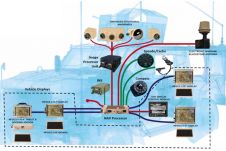
Akhka PLS的当前生产版本,Akhka R2(修订2),现在有一个更轻的扫描仪单元和一个更健壮的解决方案,用于多星座全球导航卫星系统(GNSS)耦合到光纤陀螺仪(FOG)惯性测量单元(IMU)的轨道确定。基本版本使用了在905纳米激光波长下工作的FARO Focus3D 120S扫描仪。系统上的激光扫描仪在仿形模式下工作,以略微向前倾斜的方式扫描操作员身后的交叉轨迹轮廓。
在图1中,在顶部看到GNSS天线(白板),在扫描仪下方发现IMU。坚固的平板电脑用于存储定位和定时数据;扫描仪数据存储在扫描仪中的SD存储卡上。表1给出了Akhka R2传感器的摘要。
传感器类型 |
模型 |
特征 |
GNSS接收器 |
NovAtel Flexpak6, 702GG天线 |
GPS l1, l2, l2c, l5;格洛纳斯l1 l2 l2c |
IMU |
诺斯罗普·格鲁曼公司Litef UIMU-LCI |
光纤陀螺仪,MEMS加速度计 |
扫描仪 |
FARO Focus3D 120S或X330 |
976,000分/秒,95个简介/秒 |
电脑 |
松下Toughpad FZ-G1 |
WIN-8.1, 10.1" WUXGA, SSDrive |
表1,Akhka R2中的传感器用于集成定位和激光扫描。
简单的安装
整个扫描系统设计为一个背包大小的传感器包。该传感器包的理念是将所有传感器严格安装在一个紧凑的单一束上,以最大限度地提高鲁棒性,并将平台畸变和校准需求降到最低。Akhka PLS的R2X版本是Akhka R2的一个稍加修改的版本,它使用1550纳米激光进行测距。这一类别包括FARO Focus3D系列扫描仪的远程版本,例如X330的模糊范围约为300米,也包括X130型号的测距能力高达150米。这些扫描器基本上与120S版本具有相同的物理尺寸,因此将它们中的任何一个安装到Akhka R2平台都很简单。传感器包的结构设计也支持车辆安装选项,允许在不同环境和各种数据需求下更加通用性。
精确的森林覆盖率
 PLS允许操作人员移动在现场和周围,同时捕捉环境与毫米精度。这是绘制森林地图时的一个基本特征。图2显示了Akhka R2X系统捕获的森林场景。该地块是通过在不同方向的森林中行走来收集的,以创建一个完整覆盖的数据集。数据显示了森林的详细特征(具有相似特征的树木的集合)和地形,用于精确的树茎计数、体积和冠层覆盖估计和生物量计算。
PLS允许操作人员移动在现场和周围,同时捕捉环境与毫米精度。这是绘制森林地图时的一个基本特征。图2显示了Akhka R2X系统捕获的森林场景。该地块是通过在不同方向的森林中行走来收集的,以创建一个完整覆盖的数据集。数据显示了森林的详细特征(具有相似特征的树木的集合)和地形,用于精确的树茎计数、体积和冠层覆盖估计和生物量计算。
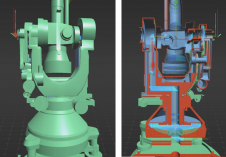
撞击坑
通过PLS获取数据使得可以捕获分析和理解对冲击者和行星模拟任务等专业活动所需的所有地形细节。此外,PLS系统可用于补充数据或验证来自较小刻度传感器系统的数据。图3说明了从爱沙尼亚萨利亚萨的Kaali冲击火山口收集的点云,以映射火山口的3D形状和尺寸。随着从点云创建的整体模型以及高密度扫描数据也可用于将火山口特征与撞击器的大小相关联。
洪水
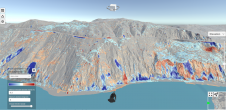
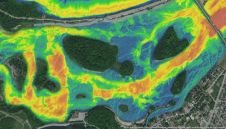
在诸如水,风,霜或冰产生的氟,风,霜或冰产生的其他自然过程的领域,可以生产用于将3D变化程度与其他受监控过程相关的详细数据,例如洪水或风(速度和方向)。
图4:西班牙Rambla de la Viuda的剖面图,代表洪水事件引起的侵蚀峡谷。
例如,河流系统的水力模型受益于详细重建洪水时期,以关联流量和河床特征。在西班牙巴伦西亚的Rambla de la Viuda,利用Akhka R2捕捉了一个被洪水侵蚀的小峡谷(图4),以重建洪水引起的变化,并为水力建模获得环境参数(如表面粗糙度)。
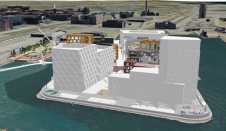
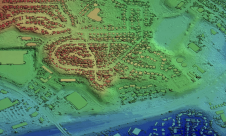
城市地图

图5:用PLS映射的城市场景
此外,PLS可用于城市制图和工业工程。PLS可以捕捉结构的细节,由于其高水平的流动性。数据收集的速度有助于精确调度任务。此外,PLS最大限度地减少了过程中断的需要,从而使其成为在繁忙的街道和工业环境中进行调查的理想方法。城市区域的三维重建(图5)可以用于新结构和建筑的建造文档和详细规划。
未来
预计PLS系统基本上是背包中的“MLS”,将广泛用于各种应用,这些应用程序需要具有高水平的结构重建和分析的数据。传感器技术正在制造更小且更小的系统,从而辅助领域和在室内的操作,只要集成计算技术就足够地发展,也能够在GNSS拒绝环境中进行准确定位。市场上已经提供了一些非常有趣的小传感器,并在商业基础上推出集成系统。然而,在给定应用程序的系统设计中考虑的主要因素是点和线测量速率,测距能力和分辨率以及角度分辨率。在找到每个应用程序和每个应用的最佳传感器布局和性能水平方面,仍有很大程度上可以完成,但是个人激光扫描绝对是一种持久的技术。
作者
antero kukko博士是芬兰地理空间研究所和Aalto大学的研究经理。他的研究包括移动激光扫描系统,性能,数据校准和处理的开发。
教授Harri Kaartinen从芬兰地理空间研究所坐标,并对激光扫描传感器,系统和应用有关的性能和质量问题进行研究。
硕士Juho-Pekka维尔塔宁目前在阿尔托大学建筑环境测量和建模研究所工作。他的研究课题是激光扫描区域信息建模与应用。
数据
数字1那Akhka R2 PLS系统适用于崎岖的地形和森林等复杂场景的详细映射。该系统由激光扫描仪GNSS-IMU导航系统,用于数据记录的平板电脑和支撑结构,都作为柔性操作的背包。
数字2,用Akhka R2X收集的林业数据。该系统不仅捕获阀杆和冠层建模的地表和显性树木,还捕获次级林层。PLS允许轻松访问和完整的复杂环境的数据覆盖。图像着色基于激光强度,而白线显示数据收集轨迹的分数。
数字3.,从Akhka R2数据计算的Kaali冲击结构的薄点云表示。点着色表示点强度和数据采集顺序,以块号(0-42)表示。25米深的陨石坑边缘直径110米。对于后处理的GNSS-IMU,数据采集轨迹用蓝色绘制,基于目标数据校正的轨迹用红色绘制。
数字4.,西班牙兰布拉德拉维达的一部分代表洪水事件引起的侵蚀蹂躏。使用Akhka R2捕获场景。使用背包扫描平台获取的数据可用作液压建模的输入数据。点着色代表地面高度。为了显示场景的规模,图像顶部中心的3D中捕获的人高1.8米。
数字5.PLS可以从建筑环境中收集完整的数据(例如,用于管理和翻新)。操作员可以利用楼梯和通道到达从街上看不见的区域。