来自内置相机的彩色点云
墙壁、天花板和地板的自动上色
配备内置摄像机的陆地激光扫描仪非常适合识别建筑内部点云中的表面。来自图像的颜色可以自动投影在平面结构上,从而产生纹理的3D型号的房间,大厅,走廊,楼梯间和其他室内空间。除此之外,可以在3D模型及其X,Y,Z位置自动识别连接到墙壁的套接字,开关和附加的其他物体。本文提出了一个案例研究。
许多地面激光扫描仪(TLSs)不仅可以获取距离测量数据,从中计算点的三维坐标,而且还配备了内置的RGB相机,产生球形全景RGB图像。
扫描仪
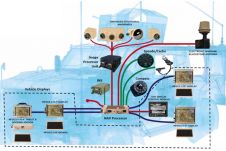
本案例研究中使用的TLS设备之一是Faro Focus 3D扫描仪(图1),该设备重4.2kg,每秒可以测量近100万个点。一个内置的800万像素摄像头捕捉RGB图像,这使得自动为点云的每个点分配颜色成为可能。高动态范围(HDR)是一种捕捉多种曝光率的图像并将其合并成一张图像的技术。HDR相机即使在光线不好的条件下也能捕捉图像,使表面在黑暗或明亮的区域都可见。得到的图像提供球形全景RGB视图。
假设
同时使用激光扫描仪和球形相机,可以为点云中的每一个点自动分配自然颜色信息。然而,当从点云构建3D模型时,并非所有点都同样有用。例如,当一个人想要塑造墙壁、天花板和地板时,从家具、花盆和咖啡杯中得到的回报是多余的。自动化过程应该考虑到不相关点的存在,而这种方法需要一些假设。其中之一是,墙壁、地板和天花板可以被几何建模为平面结构,至少在一个足够高的点密度扫描可见。此外,所有的点云和图像必须注册在一个和相同的坐标系,具有统一的尺度。进一步的假设是,垂直方向是已知的,当室内由多个空间组成时,墙壁的厚度也是已知的。
数据采集和3D建模
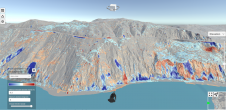
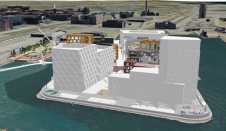
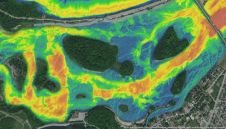
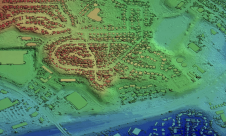
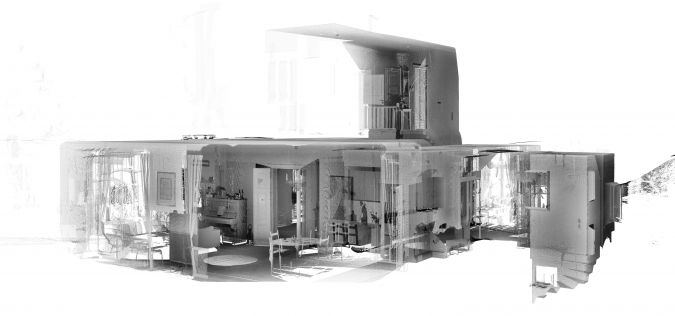
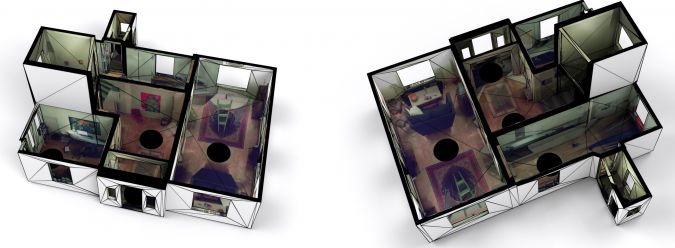
从七个扫描位置扫描了七个内部空间,从而产生7700万分的点云(图2)。在旨在将所有点带到相同坐标系中的点云注册之后,首先从低分辨率网手动创建内部的粗略3D模型。这导致了房间表面的无线框架的形式的几何概述,没有窗户和门(图3)。为了将颜色分配给表面,必须精制粗糙的线框。为此,作者开发了一种自动化过程,通过分组位于同一平面中的类似面向的三角形来检测矩形平面。从同样取向三角形的每个平面,确定最小的矩形贴片。接下来,每个补丁被细分为具有预定分辨率的像素,例如,1mm,分配颜色。这是从最近的扫描获得的,通过将连接像素和扫描仪与全景图像交叉来获得贴片的扫描。当然,像素可以被家具和存在于线连接像素和扫描仪中的其他物体封闭的像素。 This will cause the wrong colour to be assigned to the pixel. This can be avoided by removing points that do not lie on the room surfaces, but this will inevitably lead to colourless gaps. For appealing visualisations, inpainting techniques may help to fill these gaps. Removal of points not lying on the surfaces will be the subject of future research.
结果
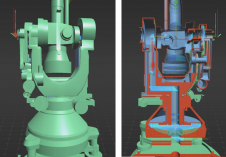
在颜色信息对应于真实表面(图4和5)的区域中,表面的颜色质量良好。彩色表面可以输入用于对象检测。图6示出了使用计算机视觉分类方法自动检测套接字的示例。当贴片和扫描仪之间的行中存在家具或物体时,可以将错误的颜色分配给修补。需要精确指定将组合在一起的三角形的平均距离;该参数主要由墙壁的厚度和扫描仪的分辨率决定。通常,质量足以进行对象检测。
结束语
该方法可用于丰富BIM模型的语义信息。此外,RGB图像提供了墙壁装饰的细节,如海报、图像、标志和其他非几何信息,这些可能对某些应用有用。除此之外,颜色信息还可以用来生成更小的3D模型,在保持图像细节的同时,适用于交互式可视化。例如,初始点云需要1.77GB的存储容量,未压缩的图像需要223MB,而彩色线框的web导出只需要一个8.08MB的HTML文件。源代码可以在https://github.com/DURAARK/orthogen.
致谢
感谢Per-Kristian Hansson进行扫描和注册,并感谢Paul Pierce授予使用数据的权限。
进一步的阅读
Krispel, U., Evers, H. L., Tamke, M., Viehauser, R., Fellner, D. W.(2015)从注册全景视图自动纹理和正射影像生成。ISPRS——Int。拱门。Photogramm。遥感。空间信息。科学。, XL-5 / W4, 131 - 137,https://doi.org/10.5194/isprsarchives-xl-5-w4-131-xl-5-w4-131-0157 p。
Krispel, U., Evers, H. L., Tamke, M., Ullrich, T.(2017)建筑信息管理中的数据完成:来自距离扫描和照片的电子线路。:可视化的工程.5, 1,https://doi.org/10.1186/s40327-017-0042-511 p。
(2015)基于室内点云的参数化建筑模型自动重建。计算机和图形《计算机辅助设计与图形学》,第5期,第9页。