Automatic Segmentation of Point Clouds in Architecture
扩展创建数字双胞胎的现有方法
已经开发了一种新的算法,该算法会自动识别建筑元素并创建3D构建内部模型。在过去的十年中,AEC/FM域中对数字双胞胎的需求增加了。另外,点云用于在BIM方法中创建3D模型。该算法称为ABM-Indoor,可与有组织和无组织的点云一起使用,并以矢量格式提供了3D建筑物的模型。现在正在努力将该模型转移到IFC。
The authors developed the ABM-indoor algorithm out of the need to extend existing methods related to automatic processing of point clouds for building information modelling (BIM), especially in the domains of architecture, engineering and manufacturing (AEC) and facility management (FM). The proposed approach has two main objectives: 1) automatic classification of the elements of organized and unorganized point clouds (floors, ceilings, walls, columns, etc.), and 2) three-dimensional modelling of the classified elements according to an LOD 300 model.
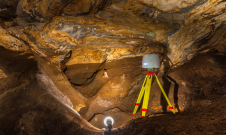
The approach focuses on the geometric information of point clouds. Two datasets were used to test ABM-indoor. One of the point clouds represents an office space with an area of approximately 800m2和三百万分。它是从静态陆地激光扫描仪(TLS)中获得的。在这种情况下,数据采集执行多次扫描,其中已知传感器的位置,因此可以组织点云。第二点云是使用动态TLS Navvis M6(室内移动映射系统(MMS))在多功能停车场中获取的,该系统带有六台相机,可获得360°图像,四个在各个高度上的激光扫描仪和6D同时定位和映射(SLAM)系统。在这种情况下,点云约为1,000m2and contains 14 million points.
Methodology
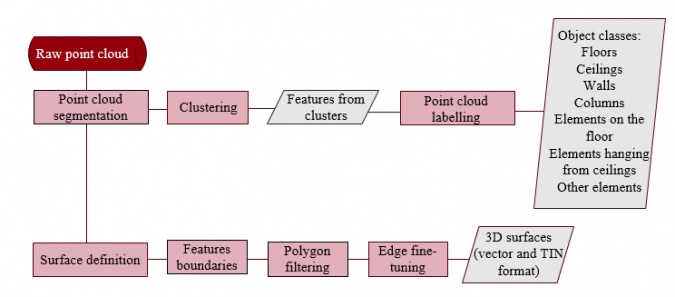
ABM室内工作流有两个主要步骤:1)使用自动聚类分割和标记点云,以及2)创建每个分类元素的3D表面(图1)。地板,天花板和墙壁被认为是平面元素。一方面,使用切片方法来识别最适合点簇的平面。首先,该算法通过使用高度值将地板和天花板标识为水平元素。其次,ABM室内使用Delaunay三角剖分创建了3D地板和天花板(Isenburg等,2006)。最后,该算法应用最小面积的约束来消除不规则和无用的表面,并执行自动边缘微调以平滑表面边界。在对点云进行分类之前,该算法使用超过四米的边缘定义建筑物的原理方向。
另一方面,ABM室内使用建筑物的主要方向和集群方向值来识别墙壁。为了从墙簇创建表面,该算法首先使用Helmert 3D变换水平地投射边界,最后应用多边形滤波和边缘微调。
The algorithm also identifies non-planar elements, such as columns. Columns are vertical elements connected to the floor slab and to the ceiling of the building. ABM-indoor uses existing gaps in the floor and ceiling to identify points that are on the vertical between the two gaps.
Once the floors, ceilings, walls and columns have been classified and modelled, the algorithm processes the remaining points to identify non-planar elements. The approach identifies content elements, such as cars, motorbikes, tables, chairs, etc. To identify and model the aforementioned irregular elements, ABM-indoor uses a tetrahedrization algorithm (Romero-Jarén & Arranz, 2020).
Experimental results
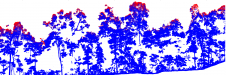
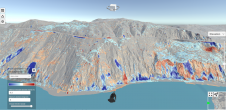
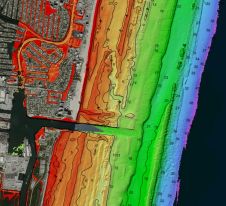
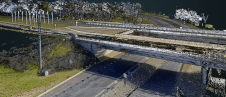
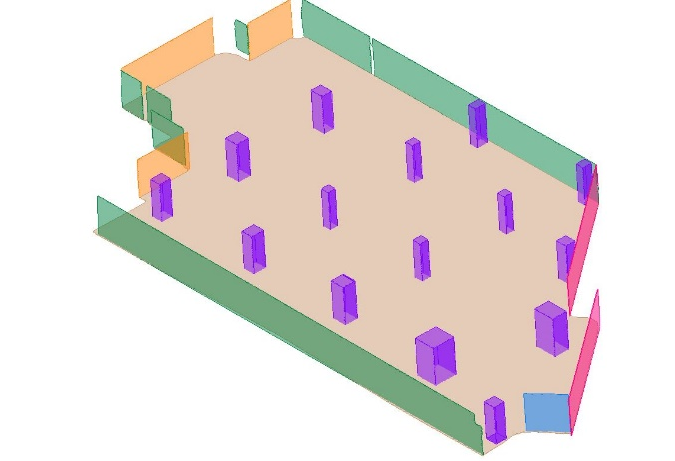
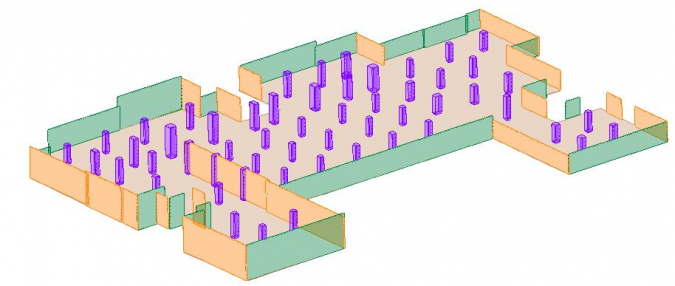
Two indoor datasets were used to test the algorithm: the office space (Figure 2) and the car park (Figure 3). In the office space, five dominant directions were established (x in orange, y in green, j in pink, k in blue, and z is height), whereas in the car park, three dominant directions were identified (x in orange, y in green, z is height).
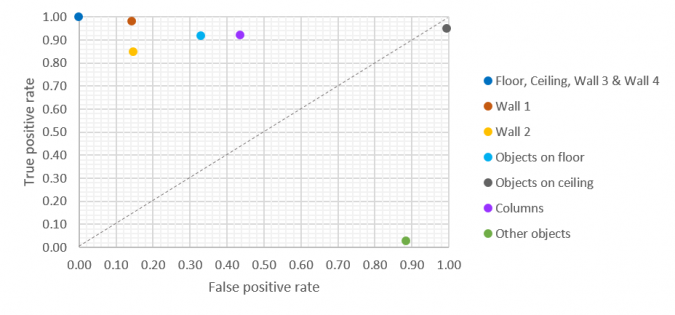
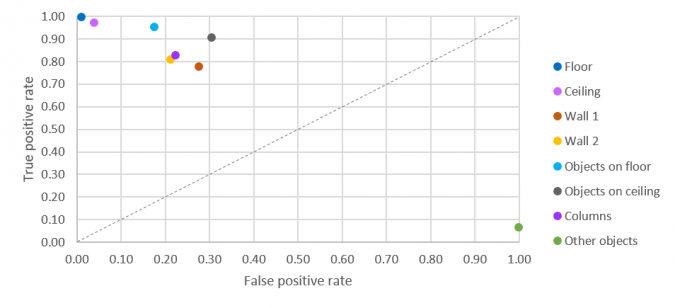
After processing the point cloud, the approach developed a precision analysis using a confusion matrix. The matrix results were used to calculate the false positive and true positive rates and these were plotted on a receiver operating characteristics (ROC) graph. Figure 4 shows the ROC graph for the office space point cloud classification. In this case, the best classified object classes are floors, ceilings and walls (directions j and k, Figure 2). For the car park point cloud, the best classified object classes are floors and ceilings (Figure 5). For both point clouds, the least favourable classification results correspond to the ‘Other Object’ object class. Nevertheless, both datasets were classified with a global precision of more than 90%.
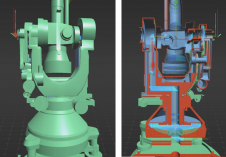
Non-planar elements are located on floors or hanging on ceilings. As mentioned above, ABM-indoor uses a tetrahedrization algorithm to classify the points belonging to these elements in order to create 3D surfaces. For instance, Figure 6 shows the 3D model of a car located in one of the point clouds. Content elements are identified and modelled as individual elements.
Solution implementation
ABM-indoor has been incorporated as an additional module that works within the MDTopX (Digi21) software, which was created more than 20 years ago. It offers multiple tools for editing point clouds and digital models. MDTopX has an interface mainly based on toolbars and dialogue boxes, available in both English and Spanish. Nowadays it is used by dozens of national and international engineering companies and public institutions. The ABM-indoor module is based on functional and commercially available libraries of the MDTopX software.
Conclusions
ABM室内是一种自动对无组织和有组织的点云进行分类和建模的方法。该算法具有迭代工作流,如图1所示,该算法从对地板和天花板进行分类和建模开始,并继续使用墙壁,列和内容元素。仅考虑点云的几何信息。三角算法用于创建元素的3D表面。作者用两个室内数据集测试了该算法,分类结果的全球精度超过90%。
The algorithm can be applied to point clouds from mobile and static systems. Since no constraints of horizontality or verticality have been imposed, the approach is capable of determining any deformations or inclinations of elements. Future work will involve studies related to deformation and displacements.
Amb-Indoor为平面元素和非平面元素提供矢量格式的文件。该算法将用于创建建筑物的原型模型(ABM)。作者目前正在努力进一步改善该算法,因为到目前为止,ABM-Indoor仅限于建模可见元素。这需要与图纸的数据以及从检查中收集的信息来考虑隐藏元素,例如梁等信息。

Acknowledgements
该研究基于一个工业博士学位(正在进行中),其中两个机构合作:马德里大学和Geololyder S. L. Spain,NIF:B86901543。当前的项目由西班牙马德里社区共同资助,项目参考编号:IND2017/TIC-7869和上述公司。此外,作者对JoséángelMartínezTorresfor assisting with the file format conversion.
Further reading
Che, J. Jung, M.J. Olsen, Object recognition, segmentation, and classification of mobile laser scanning point clouds: A state of the art review,Sensors(Switzerland) 19 (2019). doi:10.3390/s19040810.
R.Romero-Jarén, J.J. Arranz, Automatic segmentation and classification of BIM elements from point clouds,Automation in Construction124(2021)。doi:10.1016/j.autcon.2021.103576。
Isenburg, Y. Liu, J. Shewchuk, J. Snoeyink, Streaming computation of Delaunay triangulations,ACM Transactions on Graphics25 (2006) 1049–1056. doi:10.1145/1179352.1141992.

Make your inbox more interesting.添加一些地理。
Keep abreast of news, developments and technological advancement in the geomatics industry.
免费注册