三维重建教堂
将地球激光器和UAS Photogram Motry结合成一个统一模型
教堂等历史建筑的重建和维护工作需要详细而准确的信息,但要有效地获取这些信息是困难和昂贵的。地面激光雷达和基于无人机的摄影测量相结合,为收集教堂外部的完整模型提供了充分的方法。此外,它还允许通过比较地面激光雷达和来自无人机图像的点云之间的重叠区域来进行精度评估。继续往下读,了解在德国格雷夫斯瓦尔德的13世纪圣尼古拉斯大教堂的一个项目。
德国格雷夫斯瓦尔德雄伟的圣尼古拉斯大教堂可以追溯到公元13年TH.世纪(图1)。它经历了持续的维护,这需要准确,完整和最新信息,用于规划,损害评估和结构设计。大教堂的尺寸,特别是其塔的尺寸约为97米,令人印象深刻。教堂是中国历史悠久的城市风景的一部分,使其难以调查陆地测量方法的建筑。它决定两种技术的组合将提供最佳的数据集。陆地利德尔用于将大教堂的下半部分扫描到教堂殿的屋檐。该数据与无人机系统(UAS)摄影测量更加延长,用于建筑物的较高部分,包括塔楼。由于邻近的树木会干扰飞行,因此无法通过UA记录大教堂的下部。
扫描
地面激光雷达采用FARO的相位差光子120激光扫描仪。该扫描仪的测量范围可达120米,测距精度可达2毫米,距离可达25米。所有的单个扫描被连接在一起,生成一个大的、统一的点云。几个高度可见的目标被放置并在扫描中标记。每个目标都有已知的坐标,这些坐标用于坐标参考系统中的点云。
飞行准备
扫描之后,一组117个地面控制点(GCP点),每个1厘米的精度,是为在UAS调查地理配准目的布局周围的教堂。的航测用从microdrones(MD4-1000)一个UAS进行。这允许UAS比较长的飞行时间,并因此提供了较高的负载的情况下由于风或空气湍流足够的储备。使用Olympus PEN E- P2摄像机配17mm和12MP传感器大小的固定焦距被附接至UAS。
被要求仔细的规划,以获得来自UAS飞行的所有必要的信息。与显著重叠两个最低点和倾斜图像被要求减少屋顶结构附近盲点。这是决定飞向上和向下的建筑垂直条,因为这是比在水平盘旋飞行建设容易得多。这后一种方法需要在UAS和相机,其中除了改变所述取向复杂得多的取向的连续变化一次为每个垂直条。每个条带必须位于从建筑物15米和20M之间。这提供了实现高程度的图像细节,并保持足够的安全边际,以补偿强风切变之间的最佳平衡。在摄像机和建筑物之间的距离的变化必须是尽可能的小,因为相机被设置为一个固定的焦距。如果UAS分别以偏离计划的探测距离太大,图像就会变得模糊,失去作用。
两项调查
2014年3月,在阴天进行了两次UAS调查(图2)。这比晴天更好,因为强烈的光照差异和强烈的阴影导致了后续密集匹配阶段的问题。教堂的中殿是用传统的方式拍摄的,在大约60米高的地方用平行的条纹拍摄最低点。这第一次无人机飞行扩展了一些额外的倾斜图像。这总共产生了348幅教堂中殿的图像。第二架飞机被用来占领教堂的塔楼。这是在12个垂直的条带中完成的,斜视摄像机以30°的角度在立面的方向上。对于这些沿着塔的垂直飞行,图像间隔被设置为在立面上实现大约80%的图像重叠。在塔的飞行过程中,图像被连续触发,产生了550张塔的图像。这就排除了降序条带中的图像。由于一个技术问题,相机在下降时无意中向下看,导致无法使用的图像。 Since the overlap in all the strips is very high, all objects are still included in several stereo models.
密集匹配
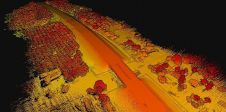
从UAS航班的图像被用来生成使用稠密匹配的3D点云。这种方法是基于用于重叠图像之间的对应关系的自动逐个像素搜索。首先,923间图像的摄影测量的定向使用Agisoft Photoscan计算。在控制点117被用于地理参考并进行结果(图3)的一个独立的检查。对于殿区,这个过程导致了大约1150万个,这是足够密集的应用程序所需的点云。
在塔的计算点云是不是足够致密的,因为它是不可能的,低图像对比度的位置提取点。该SURE软件包,由学院摄影斯图加特大学开发的,因此被选中的点云进行致密化。在肯定的是,3D坐标可以计算基于一个几个立体模型的每个像素适应半整体匹配算法。它需要取向参数和无失真的图像作为输入,使用的量,Agisoft结果。
通过SURE计算后,与小于2mm,精度保持所有点都过滤掉。接着,点云进一步通过10倍,从而导致180万点的点云变薄。这三个点云(下部,中殿和塔),然后可以合并成一个大的,一致的点云。
准确性验证
地面LIDAR和UAS点云之间的重叠区域中的代表性测试区域用于精度比较。它们位于殿的不同部分,表面积的128至330平方米。由于来自两个来源的点云基于相同的坐标系,因此可以容易地执行集成和比较。
对于每个测试区域,将UAS点云与地面激光乐节数据进行比较,该数据作为参考。通过创建直方图并通过计算平均值和标准偏差来统计分析距离值。作为异常值的比较,将大于30厘米的偏差被排除在比较之外。测试区域中表面的平均偏差在1.5cm至3.3cm的范围内。标准偏差在2.5cm至8.8cm的范围内。在诸如壁的均匀表面区域内,两个点云之间的差异低,并且在几厘米的范围内。在地面激光雷达点云中,小结构和边缘更好地表示,因为它们在UAV云中似乎平滑了。大差异主要是由于其他点云中的信息缺乏,或者在某些情况下,由偶尔的异常值或不正确的测量引起。表1显示了所有测试区域的结果。
| 地点 | 长度x高度(m) | 偏移,平均值(cm) | 偏移,西格玛(cm) | ||||
| 北地 | 25 x 8 | 1.5 | 5.4 | ||||
| 南方地面 | 32 x 4. | 3.0 | 7.1. | ||||
| 一楼南方 | 52 x 5 | 2.8 | 3.2 | ||||
| 一楼南 | 33 * 4 | 3.3 | 8.8 | ||||
| 山墙 | 15 x 22 | 2.4 | 2.5 | ||||
表1中,精度的验证结果。
结束语
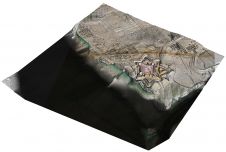
根据需要进行快速视觉检查是建筑师和规划师长久以来的梦想。这些图像为评估建筑物的当前状态提供了有价值的基础,并为重建决策提供了依据。在本项目中,TLS和UAS摄影测量的结合是一个合理的步骤,因为每种方法都能克服彼此的问题。将它们结合在一起生成了整个建筑的密集而精确的3D模型,从经济角度来看是有利的(图4)。
图1,德国格雷夫斯瓦尔德的圣尼古拉斯大教堂(Courtesy: Roland Rosner, Deutsche Stiftung Denkmalschutz)。
图2中,UAS MD4-1000准备起飞。
图3,密集匹配生成的3D模型上覆盖的gcp和检查点。
图4,中殿模型(左)和逼真的纹理渲染(右)。
作者
Dipl-Ing(FH)MSC(GIS)Matthias Naumann在奥地利萨尔茨堡大学的柏林,地理信息系统和科学大学学习测量。自2001年以来,他一直在德国罗斯托克大学的大地测量和地理信息学系。
电子信箱:matthias.naumann@uni-rostock.de
Dr-IngGörresJochenGrenzdörffer在德国图宾根大学学习地理。自1994年以来,他一直在罗斯托克大学大学大学研究所的研究员。他于2001年在罗斯托克大学完成了博士学位。
电子邮件:goerres.grenzdoerffer@uni-rostock.de
进一步阅读
诺曼等人(2015年):Symbiose冯UAS-Photogrammetrie UND TLS楚Vermessung UND 3D-Modellierung冯Kirchenbauwerken是Beispiel DES到Greifswalder球。在:钍。卢曼/通道。穆勒(HRSG):摄影测量-激光扫描- Optische 3D-Messtechnik, Beiträge der Oldenburger 3D-Tage 2015,Wichmann的 - VDE出版社,2015年。