3d点云云云云云团重建
寻求最佳规格以产生适当的输出
本文是GIM数据可视化主题周的一部分。
在与其他智能技术(如建筑传感器、交通控制、街道照明和其他先进工具)结合之前,3D城市模型被用作智能城市的基础。可以使用各种空间数据采集技术建立三维城市模型。然而,由于诸如单一透视视图等限制,使用单一类型的传感器获取完整的大规模环境三维空间数据相对具有挑战性。因此,需要集成不同类型的数据集或传感器。本文介绍了如何将传感器生成的3D点云用作数据输入,并使用Bentley ContextCapture软件进行处理,同时使用各种输入测试性能。这项研究在马来西亚的三个城市进行:普特拉贾亚、沙阿阿拉姆和柔佛巴鲁。
空中三角测量
航空三角测量是对照片进行三维重建的过程。换句话说,地面控制坐标由摄影测量手段确定,从而减少了地面测控工作。该过程识别每个photogroup输入的准确的photogroup属性,并在重建过程之前计算每个图像的位置和旋转。每个图像的位置和旋转都是从用于重建过程的元数据中计算出来的。由于每个图像已经在一个组件中,软件自动将主组件中的图像分组。
重建由几个属性定义。首先,空间框架定义空间参考系统,兴趣区域和平铺。其次,允许使用现有3D数据来控制重建并避免重建错误的重建约束。第三,参考3D模型,它充当重建沙箱,并以本机格式存储3D模型,逐步完成作为3D模型制作进度。第四,处理设置的处理设置,确定几何精度级别和其他重建设置。
航空恒定结果
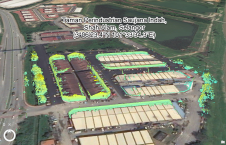
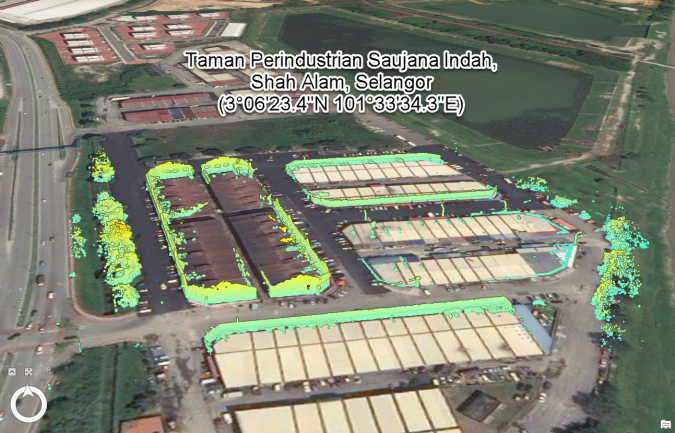
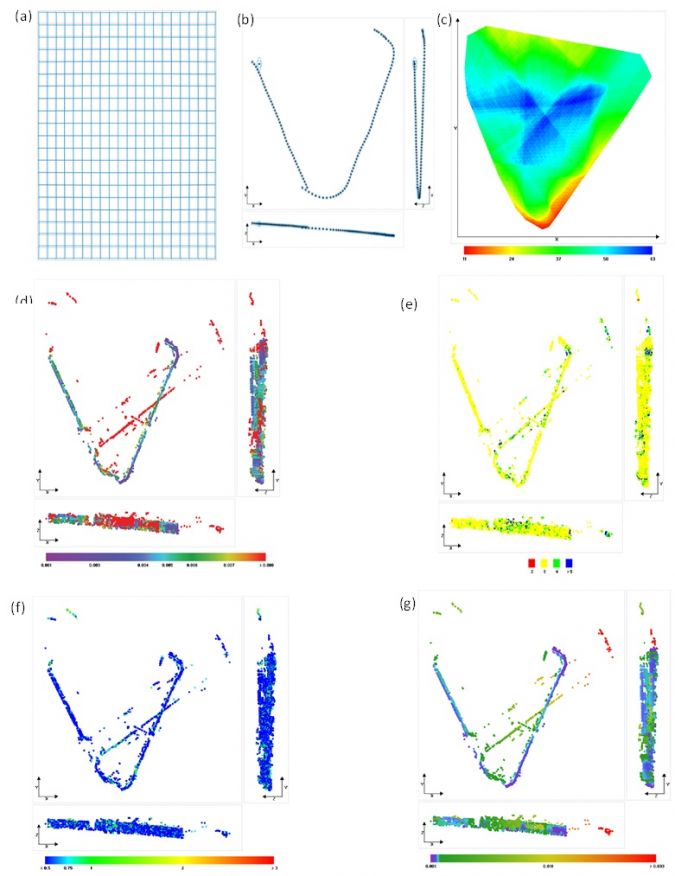
图1显示了Taman Perindustrian Saujana地区,数据集使用移动激光雷达测绘和360相机(Leica Pegasus)获得。大约有337张MMS图像被生成并用于这项研究。总面积10370.51公里2并且数据大小为1.24GB。大多数控制点都是手动输入的,而有些则从文件导入以支持准确的地理转移并避免远程度量失真图像。如果由三个或更多个控制点组成,则只能在AeroTizulation过程中使用图像,每个控制点具有两个或多个图像测量。在相机校准中的AeroTizulation过程中,网格失真(图2a),照片位置不确定性(图2b),场景覆盖(图2c),绑定点不确定性(图2d),观察连接点的图像数量(图2e)可以识别调查中的重注错误(图2F)和点分辨率(图2G)。
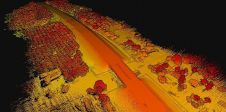
整个过程耗时37分钟。由于数据大小较低,因此不需要平铺处理数据,因为生成模型的预期内存使用量为1.4GB,并且允许在处理模式下具有额外的精度。由于使用的数据源是基于MMS和低点云密度,因此无法产生最佳的可视化效果。图3显示了点云三角剖分过程的最终输出结果。三维重建结果显示,建筑上部区域存在若干空白点,需要利用正射影像或无人机图像等其他数据进行覆盖。为了获得最佳的三维重建可视化效果,最好结合来自不同来源的几种类型的数据,如正射影像、航空图像和点云。

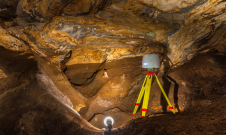
另一个测试是在新佛州的另一个地区进行的,这次集中在一个单一的建筑模块上——Dewan Muafakat建筑,Taman Kobena建筑。覆盖面积1168米2在该测试中使用了两种类型的数据输入,这是来自TLS和Acial UAV图像的点云。点云的数据大小为6.48GB,航空图像为0.64GB。工艺需要16个小时来生产3D重建模型。在重建过程中,使用具有额外精密加工的自适应平铺。图4显示了AeroTriangulation的最终输出。结果比Taman Saujana Indah的结果要好得多,因为它没有孔,上部大部分都是覆盖的。

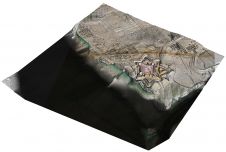
航空三角测量过程也在布特拉贾亚的一个更大的地区进行了测试。航拍图像捕捉到了64公里的区域2数据大小为2.77gB,而逆骨骼图像记录为358公里的面积2数据大小为1.24GB。总的来说,完成生产需要23个小时。图5显示了普特拉贾亚地区空中三角测量过程的输出。包括水体在内的整个区域建设成功。在重建过程中,自适应平铺用于自适应地将重建细分为长方体,以满足目标内存使用。平铺方法适用于重建具有高度非均匀分辨率数据的三维模型,如航空图像和地面图像。在这种情况下,不可能找到适合所有区域的常规栅格大小。但是,软件处理数据所需的最小内存为5.9GB。由于本测试中使用的数据是单色正马赛克图像,因此最终输出以单色显示。为了为输出产生最佳的可视化效果,需要一个有足够内存的彩色正射影像,以避免减慢过程。
挑战
执行航空三角测量过程的主要挑战是硬件,特别是在处理大数据集时。此外,为了获得最佳的可视化效果,需要对不同类型的数据源进行组合,如点云和航空图像。为了比较硬件性能,我们在同一台计算机上处理数据,使用Windows 10 64位操作系统、Intel i7处理器、16GB内存和NVIDIA GEOFORCE GTX850M显卡,因为我们从数据大小、内存、显卡、平铺和处理方式等方面测试了性能。
数据大小
数据大小的比较是在不同地面和处理时间之间进行的。额外的精密处理模式用于所有地区尺寸;然而,具有小规模的地面不需要平铺。然而,适应平铺可用于中等和大地区。3D重建需要15分钟,以完成小地面区域(0.1346km²)的过程。相反,使用自适应瓷砖的适度(0.2456km²)和大(4.551km²)地区,分别需要2小时25分钟和6小时,12分钟,以完成该过程。
计算内存
比较两个记忆体之间的处理时间,并记录数据处理完成所需的时间。在本试验中,使用了Taman Perindustrian Saujana Indah的数据。该数据使用了额外的精密处理模式,因为不需要平铺。4GB内存的RAM和16GB内存的RAM处理完成3D网格模型的时间分别为15分钟和19分钟。
显卡
使用相同的数据集,但这一次使用了两台不同的计算机和图形卡,每台计算机都使用了额外的精度处理模式和自适应平铺。英伟达GTFEX GTX 1070的处理时间为2小时25分钟,而英伟达GTFEX GTX850M则花费3小时17分钟。
瓷砖
面积为51米、采用自适应瓷砖的大型瓷砖花了4小时46分钟处理了102块瓷砖,而尺寸为25米的中型瓷砖花了6小时处理了388块瓷砖。相反,尺寸为6.6米的小瓷砖花了31小时25分钟进行加工。中型和小型瓷砖都使用常规体积瓷砖。
处理方式
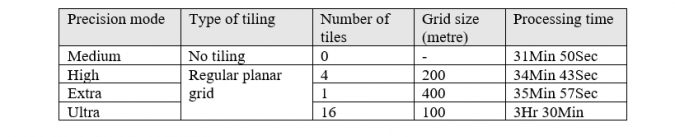
下一步是用不同的精度水平来处理相同的数据集:中、高、超、超。由于中等精度不需要贴片,因此只需要31分钟50秒就可以完成这个过程,CPU使用率为69%。高精度使用常规平面网格瓷砖生产4个瓷砖,每个瓷砖的网格大小为200米,CPU使用率为70%。这花了34分43秒的处理时间。此外,额外的精度还使用常规平面网格贴图(1个贴图,网格大小为400米),超精度使用16个贴图,网格大小为100米。额外的精度需要35分57秒,而超精度需要3小时30分钟。比较如表1所示。
规格推荐
为保证数据不间断处理,建议采用以下硬件规格。Windows 64位操作系统具有友好的操作环境,并且高度兼容各种类型的软件。至于处理器,最新的英特尔酷睿i9以其处理3D建模的能力而闻名。然而,英特尔酷睿i7的价格更经济,而且它可以支持复杂的处理和建模。至于内存,Windows 64位英特尔酷睿i7要求至少32GB才能正常运行,存储空间根据数据大小而异。但是,为了最佳使用,剩余的存储空间必须是数据大小的两倍。64GB RAM允许平滑渲染处理工作,许多研究表明,RAM越高,处理数据的时间就越短。最后,NVDIA Quadro P2000图形卡比具有相同功能的NVDIA GeForce系列慢得多,适用于各种多用途计算机工作站和中程渲染、CAD工作和设计。
结论
总的来说,需要明确的硬件规格,才能为智能城市提供高质量的可视化。这是为了确保数据处理能够在几乎没有技术问题的情况下顺利运行。此外,合适的硬件和软件的补充对于三维重建非常重要。大多数软件描述了安装的最低硬件要求,但未指定软件安装期间和之后硬件配置的效果。因此,本研究旨在确定最佳规格,以产生适合当前数据大小和研究区域之间差异需求的输出。