移动激光雷达数据分类的全自动化
使用3D CNN和SVM的端到端框架
一种名为MMCN的深度学习体系结构为从移动激光雷达系统获得的高密度3D点云数据的全自动分类提供了可能性。这为高密度地图、自动导航和公路监控等应用提供了有趣的机会。
从移动激光雷达系统(MLS)获得的高密度三维点云数据的分类在高密度地图、自主导航和公路监测等应用中至关重要。目前文献中使用的MLS数据分类算法使用了几个参数或阈值。这些参数的正确选择是这些算法在不同条件下成功的关键。本文介绍了一种称为多面多目标卷积神经网络(MMCN)的深度学习体系结构。MMCN与支持向量机(SVM)一起提供了一个端到端框架,用于自动分类输入的3D点云,而无需手动调整任何参数,因此提供了完全自动化的可能性。
建筑学
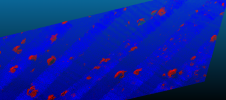
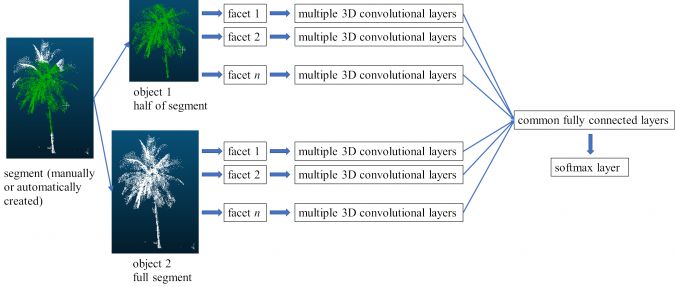
提出的MMCN算法使用MLS段的多个面和多个目标(Kumar et al., 2020)。对象是段的子部分。通过自动创建多个子部件,生成同一段的多个对象。每个对象的多个面或方向是通过围绕x、y和z轴旋转对象创建的。因此,不同的对象和方面合并了来自同一段不同部分的信息。此外,对于每个facet, MMCN的输入层和卷积层是分离的,而每个facet的最后一个卷积层在公共的全连接层合并。最后一个全连接层是输出层,使用softmax功能。因此,MMCN能够解释关于一个段的各种不同的信息。在MMCN的训练过程中,将上述方法应用于人工标记样本。在分类过程中,通过自动分割点组来创建线段(详见下文); these segments do not need to belong to a single class and can have different levels of noise, background clutter and occlusion as is evident in MLS data. Through training, the algorithm learns local structures and variations within a segment along with noise and clutter. Figure 1 shows the architecture of the MMCN for a segmented group of points.
分类
将训练后的MMCN与支持向量机相结合,为MLS点云的完全自动提取和分类提供端到端框架。该框架以任意大小的MLS点云作为输入,并为每个数据点分配类标签。在给定半径下,在MLS数据集中所有点周围做球面段。这些片段通过训练有素的MMCN传递。对于给定的输入段,MMCN的softmax层生成一个属于不同类别的概率向量。将相同的概率向量分配给分段内的所有点。一个点可能出现在半径不同的多个球段中。在这种情况下,所有这些片段的概率向量相加,并除以这些片段的数量。这给出了在给定半径下,点的最终概率向量。同样,通过改变半径,MLS数据集中所有点的多组概率向量被计算出来。 The resulting multiple probability vectors using multiple radii for each point are concatenated and used as a feature vector for training an SVM. The trained SVM then gives the final decision for the classification of the point. Varying the radius around a point forms various shaped segments that incorporate different local neighbourhoods. This provides under-segmentation as well as over-segmentation information to the framework, which is able to learn the variations associated with changing surroundings.
结果
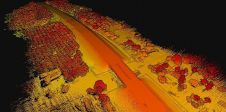
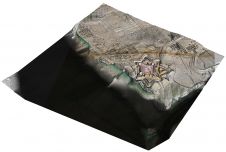
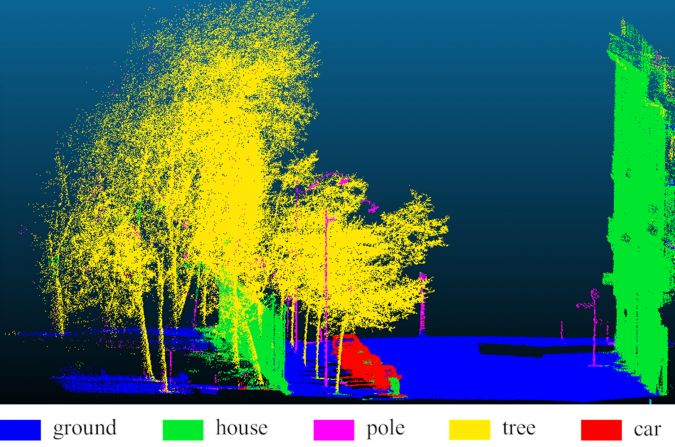
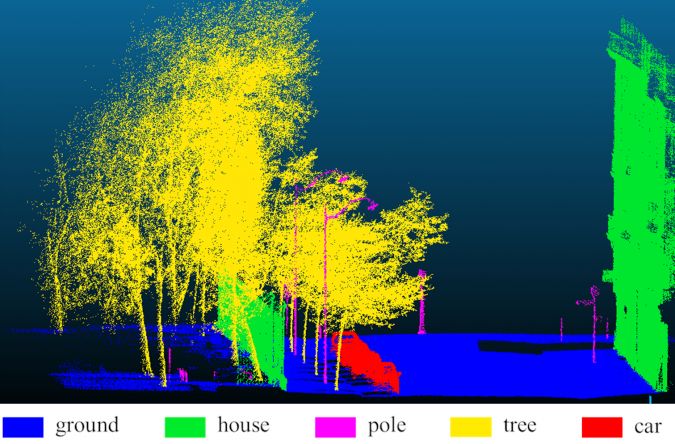
在开发的框架中,只需要对MMCN和SVM进行训练。因此,它独立于任何MLS参数调优(多个半径值或多或少取决于可用硬件,而不需要任何手动调优)。在这个框架中,只需要XYZ点信息。此外,网络已经发展和训练从噪声,遮挡,背景杂波和混合数据点从其他类。MMCN和SVM已经在包含1.42亿数据点的巴黎-里尔3D数据集(Roynard et al. 2018)上进行了测试。该方法的最大总准确度为96.5%,kappa值为93.8%。关于MMCN和SVM的更多细节可以在Kumar et al. 2020中找到。图2和图3分别表示了使用MMCN和SVM的分类结果,以及对应的ground truth。在本研究中,由于硬件限制,使用了较少的卷积层、特征图、神经元和训练样本。这导致了一些错误的分类。
结论
高密度三维MLS点云的分类是一项具有挑战性的任务。在使用大量实时(或近实时)数据在地面实际实施期间,传统分类方法中要求的MLS参数手动调整是不可取的。相反,需要一种能够跨不同地形和数据集工作的分类算法,该算法很少或没有变化。所提出的方法可以适用于任何地形数据集,包括噪声、背景杂波和遮挡,无需调整。因此,这为MLS分类提供了更广泛的实用解决方案。开发的下一步是实施拟议的行业级数据处理方法。
进一步的阅读
Kumar, B., Pandey, G., Lohani, B., Misra, s.c., 2020。一个使用多区域和3D CNN架构的移动激光雷达数据自动分类框架。国际遥感学报. 内政部:10.1080/01431161.2020.1734252。
罗纳德,J.E.,古莱特,F., 2018。Paris-Lille-3D:用于自动分割和分类的大型高质量地面真实城市点云数据集。arXiv: 1712.00032。可在线获取:https://arxiv.org/abs/1712.00032(2020年1月9日访问)。