如何获得LIDAR测量的最佳导航数据
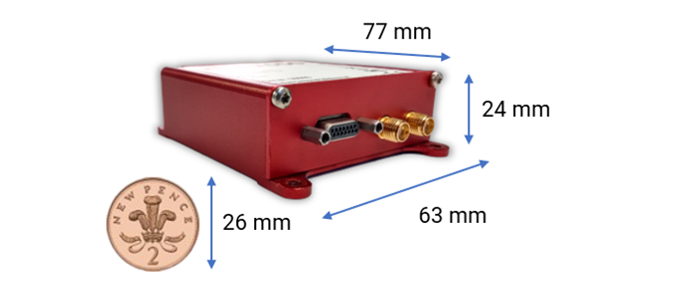
牛津技术解决方案的一项新INS旨在打破新的基础,将高质量的导航数据带到激光雷达测量行业。XNAV650于2021年3月22日启动,有望成为该公司迄今为止最小,最轻巧,最负担得起的INS,其最新技术是由LIDAR测量师开发的。
很容易避开导航设备,而有利于测量设备,但是调查主要是定位空间中的对象。这需要最好的导航数据。但是,这些设备可能很难与LIDAR单元配对,或者与测量设备相关的设备可能非常昂贵。这款新的惯性导航系统(INS)是在所有这些方面都构建的,并带有独特的软件套件,该套件允许测量师使用INS和LIDAR生成全点云等。
如何接口设备
接口是让硬件设置准备好并工作的非常重要的方面,并且每个测量员都有不同的需求,具体取决于他们的应用程序和他们希望使用的设备。INS更灵活,可以使用这些,更好。很少有单位提供PTP(精确时间协议)以将其时间数据与LIDAR同步,即使激光雷达单位通常会作为不需要定制布线的简单方法;只需要以太网连接。XNAV650为时间同步提供PTP,但还提供传统的PPS与任何LIDAR和设置灵活地工作。许多输出和输入触发器和发送NMEA数据的选项也是可用的,因此您可以确保您能够准确地获得所需的信心,无论您的应用程序如何。
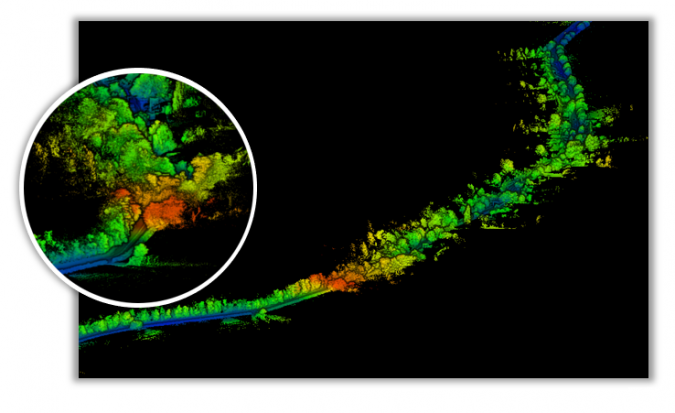
如何发地地发声点云
也许是最骄傲的产品牛是OXTS GeoreFerencer,它是一个结合LIDAR和OXTS INS数据以创建点云的软件包。无论是由于缺乏专业知识,时间还是预算,对于测量师来说,创建自己的程序来解码LIDAR数据和INS数据,然后将其结合起来以将其结合到Georeference中,这通常是一个困难和低估的步骤。牛Georeferencer与最大制造商的各种LIDAR单元一起工作,并提供具有丰富经验的独特功能。这些功能之一是计算其位置估计不确定性的每个点。可以在PointCloud本身中查看此数据,并且可以编辑PointCloud以删除不准确的点或识别需要重新流程的区域。OXTS与LIDAR制造商(例如Velodyne)合作,考虑到最终用户。
如何校准你的潮流乐队
非常重要的考虑因素是如何校准激光乐队和坐标帧。在考虑点云的准确性时,需要非常高的角度精度。导航数据约为0.05O,因此LIDAR的方向相对于INS的方向应该以这种高精度所知。这是与传统方法做的很困难和耗时,并且可以轻松成为准确性方面的瓶颈。OXTS GeoreFerencer提供了一个非常直观的数据驱动校准解决方案,以便适当地对准坐标框架。可以将过程添加到十分钟内的任何调查中,如果硬件设置没有更改,则不需要重复。这最大化了设置灵活性。OXTS Georeferencer还提供便利的窗口,以帮助您在视觉上获得正确的方向。
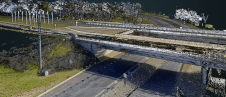
例案研究 - 桥梁调查
以下是使用VLP16 LIDAR和XNAV650的无人机调查的示例案例研究。使用OXTS Georeferencer处理了数据,包括使用Boryight校准功能。目的是扫描老化桥以找到潜在的结构性弱点或过度的区域。
无人机已经在桥周围飞过,以从每个角度观察它。这要求设置良好校准。否则,相同对象的不同观点将结合起来给出模糊和双视觉。
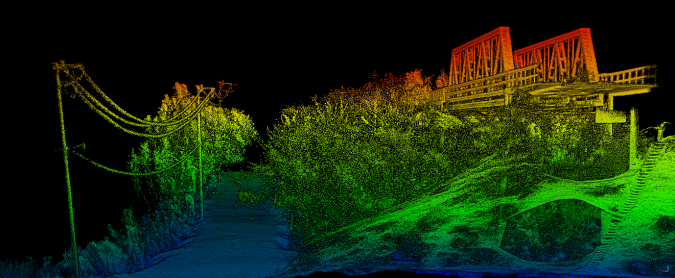
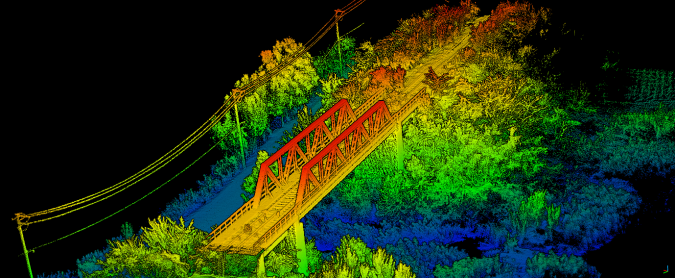
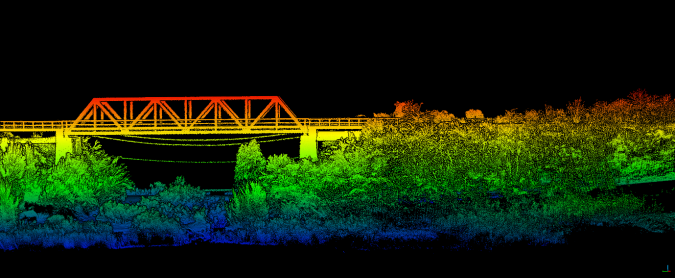
LiDAR数据已直接登录到INS上,节省了功率和重量,并允许长时间的时间在桥上获得大量视角并产生非常完整的点云。
如何完成进一步的申请
任何数量的应用程序都可以使用XNAV650和OXTS GeOReferencer进行。例如:
- 建筑调查
- 沿海监测
- 林业调查
- 地图创建
- 管道探索
- 铁路调查
应用程序不会停止LIDAR;界面和导航数据XNAV650使其适用于任何测量工作,无论是摄影还是检测气体。
要了解有关XNAV650的更多信息,请观看下面的视频。