Point Clouds – the Representation of the Third Kind
Point clouds should be considered as the third kind of representation, alongside polyhedral surface representations and volumetric voxel representations, according to Edward Verbree in this column.
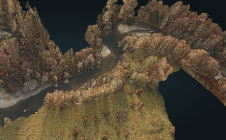
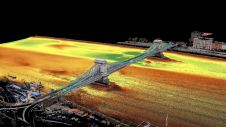
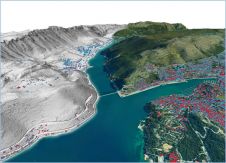
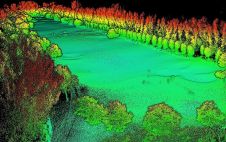
'GIM International'has published – and will no doubt continue to publish – many articles about point clouds: huge collections of (surface) points. Taken together, they represent the world at its best: up to date, and with every detail there is to be known. Most articles pay particular attention to the data acquisition of such point clouds, as they are obtained from 1) Lidar time-stamped reflections with the advantage of indicating ‘empty’ space between the observation point(s) and surface points, and 2) images by structure from motion (SfM) and dense image matching (DIM) techniques with the benefit of colour-enriched points. In this column, Edward Verbree explains why he believes point clouds should be considered as the third kind of representation, alongside polyhedral surface representations and volumetric voxel representations.
Nowadays they are not only obtained by high-end professional equipment, but also ever-more point clouds are ever-increasingly captured using low-cost (consumer) hardware such as smartphone cameras and (relatively) cheap Lidar systems developed for self-driving cars and indoor robotics. This development also bridges the gap from outdoor to indoor mapping. The indoor ‘terra incognita’ where we all spend more than 80% of our lives is yet to be captured and represented to its full extent by point clouds. In other words, the world as we know it – and which is thus its own best model – is being sensed increasingly appropriately and more often, more densely and with more (derived) attributes by point clouds.
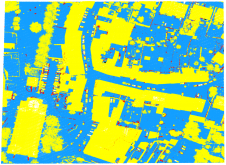
But just because all these point clouds are available, it does not automatically mean they are used to their full potential. Instead, point clouds are still misused for deriving polyhedral 3D city models with a relatively low level of detail (LOD). The necessary steps to obtain a better LOD are not that easy, not least because the detail is in the point cloud itself. Deciding which points contribute to which polygon of the (hopefully) watertight polygonal mesh unlocks a new version of the well-known quote fromAnimal Farm(George Orwell): “All points are equal. But some points are more equal than others”. Only the end user can decide which points are really important – and that is impossible if the majority of the points are discarded (thus losing their connection) after being processed into 3D city models.
Moreover, this modelling step takes time and requires a lot of manual effort. Most buildings have some kind of architectural design and thus are not simply extruded blocks with an arbitrary roof shape. Therefore, fully automatic processing of LOD2 models that meets the user requirements seems to be so problematic that most digital-twin models are still partly ‘handmade’. Such 3D models are outdated as soon as they are published, and no one knows how well these city models represent reality because the link with their original point clouds is not maintained.
Other researchers opt for a voxel-based, volumetric, Minecraft-like representation. The main disadvantage is the need to set a fixed orientation and a fixed sampling rate of the building blocks. However, as they look unrealistic, people are less likely to regard them as the truth than polyhedral representations.
One statement always made in regard to handling huge point clouds is that they are… huge. Well yes, they are, which is why much can also be said in favour of such large ‘3D’ (which are often actually only 2.5D) city models. For example, one very big advantage of point clouds is that they are relatively simple: effectively merely a bunch of X,Y,Z coordinates with some attributes. Well-accepted file-based standards (LAS/LAZ) have proven their value for the dissemination of point clouds. Smart structuring and (fast) queries from point clouds maintained in a DBMS with the continuous level of detail of point clouds as the fourth dimension is an ongoing research activity with promising results.
因此,对点云的处理很重要,但是如上所述,关键问题是它们用于探索性可视化和分析目的的有效用途。首先,“丰富”点云范式通过用全面的几何,辐射和语义属性丰富它们来强调密集的3D点云的概念。当云本身意识到这些属性时,它们就会变得“聪明”。如果决策基于点云,尤其是必须考虑到植被时,对决策的可见性分析就可以提供更详细和现实的结果。
而且,让我们不要忘记人类皮质的能力。我们的人类仍然非常擅长检测3D场景中的细节。在3D建模过程中可能会丢失的一些出色要点可能比场景中的所有其他点更重要。建筑物的哪些部分是按设计建造的,哪些不是?分析工具(例如基于点云的变更检测),以及屏幕上的高端3D点云可视化工具,在基于点云的增强现实环境中更好地支持了点云的探索性使用。
最后但并非最不重要的一点是,为什么要花很多时间,精力和金钱在收集点云上,将它们视为输入数据,将它们处理成衍生物,然后将其丢弃?如果您考虑一下,那太荒谬了。取而代之的是,我认为点云应与多面体表面表示和体积体素表示同在第三种表示。但是,通过探索性可视化和分析,它们可以提供更多的见识(因为它们或多或少是现实)。所以我的建议是:按原样使用它们!
Thanks for help and inspiration in writing this column go to Martijn Meijers, Peter van Oosterom and Mathias Lemmens, as well as many MSc students of geomatics and GIMA at TU Delft.

Make your inbox more interesting.Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
Sign up for free