Mapping a University Campus in Brazil
Creating Indoor and Outdoor Maps for a Routing Application
一个试点项目在巴西库里蒂巴的一个大学校园进行,旨在使用UAS摄影测量法以及室内平面图创建户外地图。
At universities, facility managers and other support staff need easy access to data, including geodata, for maintenance, safety measures or routing of students, staff and visitors. A responsive geodatabase containing detailed and up-to-date information on roads, the interior and exterior of buildings and other objects is a key tool in that context. The authors of this article describe a pilot project conducted at a university campus in Curitiba, Brazil, aimed at creating outdoor maps using unmanned aerial system (UAS) photogrammetry as well as indoor floor plans. They also demonstrate the possibilities of the database with a routing application.
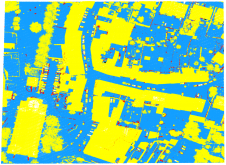
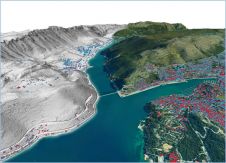
The Federal University of Paraná (UFPR) is headquartered in Curitiba, but it has a total of 26 campuses distributed throughout the entire state of Paraná in southern Brazil. Together the campuses comprise 1,100 hectares, of which 50 hectares are taken up by 316 buildings. In 2014, an ambitious pilot project called ‘UFPR CampusMap’ was launched, aimed at developing an enterprise GIS or ‘smart geodatabase’ for the university administration. To start with, an indoor and outdoor geodatabase of the Centro Politécnico campus in Curitiba was created (Figure 1). Within this pilot, the floor plans were obtained from facility managers, while the outdoor part of the database was created using UAS photogrammetry.

UAS摄影测量法
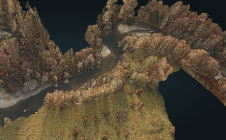
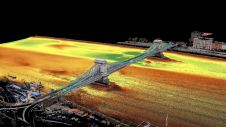
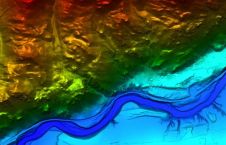
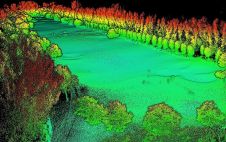
The base map was created from images captured with a幻影4from DJI. For small areas, UAS photogrammetry is faster and cheaper than traditional photogrammetry. The campus was captured by 1,438 images with a ground sample distance (GSD) of 2.5cm and georeferenced using 50 control points measured with GNSS (Figure 2). Tie point extraction and bundle block adjustment with self-calibration was conducted usingAgisoft Photoscan。与焦距,主点和透镜失真系数(即内部方向的参数)同时计算领带的外部方向参数和3D对象坐标。使用密集的图像匹配,生成了5.16亿点,点密度为600点/平方米。从点云和图像生成了数字表面模型(参见图3)和正瘤。接下来,根据巴西映射机构的标准,通过立体声编译手动提取建筑物和其他物体的轮廓(图4)。存储不同类型的对象的层已编辑QGIS,构建了拓扑,并使用Postgres/PostGIS创建了空间数据库。
将35个检查点的3D坐标(用GNSS测量)与直接从数字表面模型和3D观看的3D坐标进行了比较。平面均方根误差(RMSE)为4厘米(1.6px),高度RMSE为1cm(0.4px)。3D RMSE为4厘米(1.6px)。这些映射精度比巴西映射精度标准所定义的1:1,000地图的要求要好。

在室内
在地图上代表了建筑物,房间,门,出口,走廊,楼梯和电梯的2D大纲(图5A)。为路由目的定义了过渡点。这些要点对于使用两个空间之间的最短路径至关重要Dijkstra’s algorithm。Doors and corridors enable horizontal transportation between spaces on the same floor. Stairs and elevators enable transportation in the vertical direction. Exits enable transportation between indoor and outdoor spaces. In the case of doors, the transition point was manually placed in the middle of the threshold and for corridors it was placed at the intersection of the centre lines of two corridors. The transition points and their connections resulted in a skeleton map (Figure 5). The centre lines of the corridors were created manually (Figure 5b). Next, the link between the transition points and the central corridor were created using the PostGIS function ST-ShortestLine (Figure 5c).

路由
为了找到两个位置之间的最短路线,Dijkstra的算法将成本分配给轨迹的长度。为此,将骨架图通过使用PostGIS函数拓扑结构。通过定义10厘米的公差自动捕获断开的相邻线段。连接后,线段变成了图的边缘。每个建筑的故事数量从两到五个不等,所有楼层都有相同的平面图。不谨慎地应用拓扑。因此,除了将OpenStreetMap数据与骨架图结合的地面层外,每层创建子图。如果路由需要多层楼,则通过创建将过渡点与子图的起点和终点链接的边缘连接的子图。在成本函数中,两层之间的欧几里得距离。实际上,这意味着最大。 2m, which is a small distance compared to the total length of the routing.

展望未来
This routing algorithm allows the determination of the shortest path between two indoor points or between indoor/outdoor points. The next step is to differentiate according to mode of transport, such as on foot, by bicycle or on a moped. Using QGIS,PostGIS和Python,骨架图的创建将能够完全自动化,包括边缘和节点的确定。将为其他UFPR校园创建类似的室内/室外数据库,这些数据库又将构成企业GIS的核心。

使您的收件箱更有趣。Add some geo.
Keep abreast of news, developments and technological advancement in the geomatics industry.
免费注册