激光雷达质量保证
用于处理激光雷达点云的开源软件
处理激光雷达点云的基本工具可以根据需要进行扩展,为服务提供商和用户提供了一个灵活的平台。西班牙D188asia备用网址ielmo 3D公司和澳大利亚Water Management公司已经展示了一个公开可用的开源应用程序,该程序具有可视化、编辑和分析激光雷达点云的基本工具,该程序已经扩展为一个兼容的平台,可以服务于各种应用程序,包括电线线走廊的绘图、土地用途和河床。
作者:José Carlos Garcia和Rafael Torró(西班牙),以及David海恩(澳大利亚)
该平台名为DielmoOpenLiDAR,根据GNU GPL许可证发布,能够管理和显示海量激光雷达数据集以及矢量、光栅、OGC服务,如WMS、WFS、WCS和其他地理信息。对于专业用户来说,关键的好处是实现新算法以生成任何输出的简单性,以及以平铺结构轻松启动这些算法的可能性,从而允许在不同的计算机上进行处理以提高速度。该平台基于开源软件,主要是gvSIG和SEXTANTE。开源允许免费使用许多功能,这减少了开发成本和时间,并在不需要任何许可成本的情况下扩展了服务。
质量保证
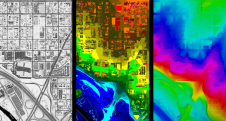
平台的核心是质量保证(QA)的部分,使基本的统计数据来自拉斯维加斯的头文件,特别是捕获的边框区域和表(表1),添加到这个统计数据确定的区域被每次飞行线,包括在飞行线上捕获的区域的形状和表(表2)。QA模块还使用地面真值和飞行线之间重叠的冗余计算高度精度。对完整性的检查是通过指示有间隙的区域来进行的,这些间隙通常与水体相对应,但也可能涉及错误地没有被捕获的区域。此外,该软件以用户指示的间隔勾勒出区域的点密度,从而也突出了不符合点密度要求的区域(图1)。匹配误差的测量是从重叠区域内平坦区域的点的高度差获得的。
文件 |
密集 (点/ m2] |
#点 |
区域[m2] |
Z最大值[m] |
Z最小[m] |
版本 |
C: dielmo5366849.las |
0.3674 |
7,198 |
19591 .89 |
289.37 |
230.07 |
LAS10F0 |
C: dielmo5376847.las |
1.7393 |
11586年 |
6661 .29 |
353.02 |
325.72 |
LAS10F0 |
C: dielmo5376848.las |
0.039 |
34,075 |
873705 .47点 |
360.8 |
97.23 |
LAS10F0 |
C:dielmo5376849.las |
0.26129 |
261274年 |
999,950.00 |
265.38 |
82.44 |
LAS10F0 |
C:dielmo5376850.las |
0.37609 |
131508年 |
349672年,76年 |
245.91 |
116.75 |
LAS10F0 |
表1,QA表示例,包含文件路径,近似点密度,点总数,
覆盖面积、高度范围和LAS格式。
弗林 |
#要点 |
区域[m2] |
密集 (点/ m2] |
19 |
8242256年 |
1396576 .19 |
5.90176 |
17 |
840891年 |
161861 .65点 |
5.19512 |
35 |
10366201年 |
1732498 .00 |
5.98338 |
36 |
283127年 |
72400 .00 |
3.91059 |
18 |
7,951,762 |
1409562 .09点 |
5.6413 |
33 |
9,321,257 |
1414111 .28点 |
6.5916 |
表2,QA表示例,包含航班号,总点数,
重叠的面积和平均点密度。
除了QA之外,该平台还可以从激光雷达点云中获得各种参数,并将这些参数与其他(矢量)地理数据集进行比较。后者支持验证地理数据集的内容并检测随时间的变化。
电力线走廊
输电线路的走廊通常沿着植被可能快速生长并变得非常高的带状地带,电缆和电缆塔的侵入可能会造成破坏和危险情况。测绘这样的走廊是机载激光雷达的首次应用之一。为了在飞行后快速获得可靠的结果,自动化是关键。总共35个步骤使植被风险分析报告可以在3周内提供,地面清理报告可以在4周内提供。15个步骤关注QA, 10个步骤完全自动执行,10个步骤需要手动编辑。
电缆和电缆塔由地图和激光雷达数据手工数字化并存储为矢量层,这些表示校正后的网络。接下来,超过40种类型的分类——包括建筑物、道路、地面、塔、不同电压下的导体和交叉线——通过激光雷达点云进行手动识别和概述。修正后的网络质量保证后,用于交叉检查激光雷达分类结果。接下来,手动勾勒出可能干扰电缆和塔架的任何植被。为了确保多边形不包含错误,例如在分类为植被的塔架中的点,将手动检查它们(图2)。然后重复计算和QA,生成植被侵蚀报告。最后,确定每根导线到地面、道路或其他导线的最小距离。结果报告根据激光雷达数据采集时的天气条件显示了导体的接地间隙。
土地利用
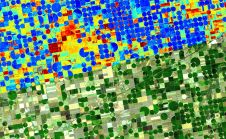
西班牙地籍管理局希望自动检测其数据集中的土地使用错误。为了支持这一目标,迪尔莫开发了灾难激光雷达模块。基于高度和冠层覆盖率等植被参数,基于最大似然分类,可以在激光雷达点云中识别不同的土地用途,包括耕地、葡萄园、橄榄、葡萄藤、柑橘、河岸树和草地。土地使用类型在模块中定义,但用户可以自由添加扩展。该模块还允许检测游泳池、灌溉水库和地籍数据中未显示的其他建筑物。建筑物高度(图3)和建筑物位移的变化以及数据集中存在但在激光雷达点云中不存在的建筑物都可以识别。
河床
从激光雷达高度获得的各种参数可用于改进水文数据集并支持洪水建模。由于难以接近和植被密集,河床的数字高程模型(dem)往往粗糙和不准确。这些dem通常通过可能引入伪影的插值来密集化。Dielmo开发了改进河床DEM的算法。首先,根据激光雷达数据创建DEM,然后手工绘制河流轴线和区域轮廓。接下来,从DEM中提取间隔为1米的剖面,并确定每个剖面的最低点。下行时,型材的高度应该下降,不遵守此规则的型材将被排除。其余部分则通过与激光雷达数据的积分来校正插值。该方法也可用于扩展由GNSS测量的等深线激光雷达DEM。利用这些剖面作为参考高度,可以完成激光雷达DEM。
结束语
在与林务人员协商后,该平台已扩展用于估计造林参数,如高度、冠层盖度、树冠直径和森林的垂直结构。java可执行代码和用户文档可以下载.服务提供商可以根据任何客户的需求定制软件,而用户可以在软件上自己构建新的工具。未来的发展将集中在测深激光雷达数据上。挑战在于水床的分类和噪声点与小岩石之间的自动识别。
作者简介
Jose Carlos加西亚他是Dielmo 3D s.l.公司的创始人和首席执行官,该公司成立于2003年。在此之前,他在西班牙巴伦西亚大学研究了提高近地卫星遥感组dem质量和精度的方法。电子邮件:dielmo@dielmo.com
大卫·海因他是Land and Water Management Pty Ltd的首席执行官,专门从事农业信息管理系统以及将传感器集成到自动化信息系统。电子邮件:David.Hine@landandwater.com.au
拉法Torro拥有地理学学士学位和地理信息系统和遥感理学硕士学位。他是Dielmo 3D S.L.的国际业务开发人员,并参与了西班牙区域制图研究所的研究项目。电子邮件:rafa@dielmo.com