
复杂城市环境中固有的规划,灾害管理和安全挑战呼吁创新解决方案。世界各地的研究人员正在通过数字双胞胎,体素,光检测和测距(LIDAR)等方法来绘制尖端工作,以开发具有先前不可能的细节,准确性和保真度的模型和模拟。与新南威尔士大学(UNSW)联系,欧洲航空测量行业(EAASI)协会从澳大利亚周围的研究机构汇集了四位专家,以分享有关3D城市模型的潜力的见解和推进知识下一个级别。
教授,博士茜茜Zlatanova,建筑环境学院网格实验室(地理空间研究创新与发展)负责人,联系她在悉尼的演讲拉开了会议的序幕点云和更远:3D建模范例.城市“数字双胞胎”是一种能够在物理和数字状态之间融合的数字复制品,近年来出现了一个热门话题。它应了解从城市规划到智能城市到灾害管理的各种应用的能力。它超出了一个简单的地理空间模型,提供了关于行为的数据,对象之间的联系以及一系列其他因素,从而实现了真实和数字世界的静态和动态信息的融合。遥感户外和室内对于3D城市建模至关重要,特别是3D更新和3D分析,特别是动态分析。3D变化检测仍然需要更好的程序以及3D空间发生的事情,以及未来的研究是明智的,以专注于这些基本领域。
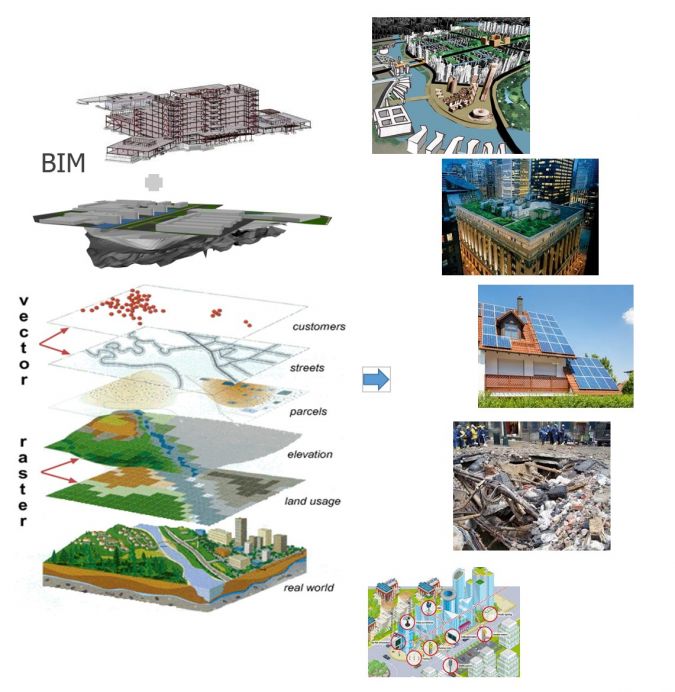
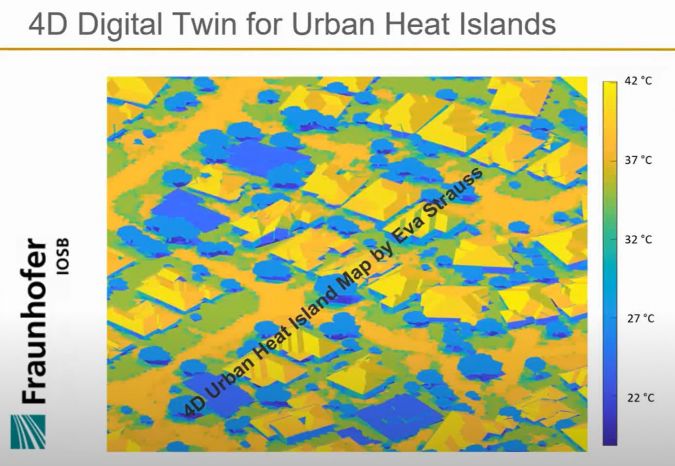
博士佩特拉Helmholz是北京大学地球与行星科学学院的摄影测量、遥感和图像分析专家科廷大学在澳大利亚珀斯。从点云和图像到建立轮廓和模型,佩特拉对3D城市建模和城市热检测的工作结合使用弗劳恩霍夫研究所在德国卡尔斯鲁厄。详细级别逐渐建立,从来自激光扫描仪或图像的数字表面模型(DSM)开始,然后使用数字地形模型(DTM)提取地形。应用垂直阈值限制,创建一个地面掩模,并使用归一化DSM创建的最终DTM。
目标是使用摩尔轮廓追踪算法作为初始步骤生成一个近似的建筑多边形模型,然后根据建筑的几何属性使用数据驱动算法。模型的准确性取决于两个因素:图像的分辨率和点云的分辨率或密度。由于摩尔轮廓追踪算法方法的精度不高,需要额外的数学建模。Gauss-Helmert和Gauss-Markov模型都被用来调整建筑多边形,结果是一个更好的轮廓,更能代表建筑掩模,在珀斯的126个建筑研究区域的平均误差为0.91 cm到1m。由于澳大利亚大都市住宅设计的复杂性,需要额外的建模来实现完整的语义3D模型,并模拟地表温度来开发城市热岛的4D数字孪生。近年来,随着空间、时间和光谱分辨率的提高,数据图像变得更加密集,使得创建更详细、更精确的模型成为可能。这些模型促进了包括城市规划者在内的最终用户的工作,支持创建更宜居城市的总体目标。
博士杰克巴顿,Grid实验室的经理联系他是一名建筑师,专攻3D绘图和城市建模应用。他解释了体素在处理和分析方面的潜力,并分享了一些新的方法学方法。悉尼的海港大桥和歌剧院由于其著名的复杂性对传统建模提出了挑战,体素提供了一个简单的解决方案。体素是一种离散的3D像素化方法,有无数的应用,包括医学、几何和建筑环境研究。体素对模型很有用,因为它们提供了比2D或矢量分析更有价值的体积级数据,为阴影投射和其他体积分析提供了可见性分析。在澳大利亚,激光雷达越来越多地用于在大范围内收集大量点云数据,对现有数据进行标记和添加语义层,以支持空间分析。体素能够识别更大的颗粒细节,在点云中引入智能,使对象识别和定义更容易,从而改进和加快数据分析过程。
体素还可以用于室内体积计算,结合大比例尺地形图、航空激光雷达或摄影点云和可用的建筑实践数据来估计每个住房单元的体积和楼层面积。这些体素化数据可以快速有效地揭示传统基于矢量技术无法获得的关键信息。这种智能方法有多种应用,包括应急规划、路径建模和公共建筑中的动态寻路。它能够对建筑物内的烟雾、气体和火灾等紧急疏散因素进行智能建模,提供关键数据,为规划提供信息。
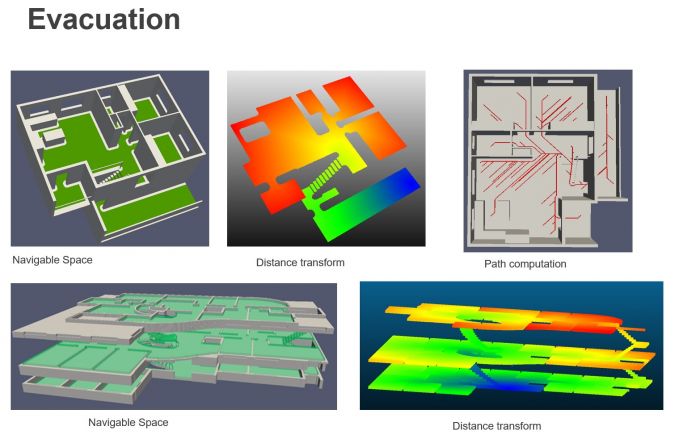
将体素化与点云相结合,可提供3D和4D快速分析和模拟,为规划提供信息,特别是在应急响应中。在八叉树导航建模领域的进一步研究提供了降低计算复杂性、控制细节和最重要的空间分析的潜力。
拥有自主测绘、定位和3D计算机视觉的专业知识,A/教授Kourosh Khoshelham.,墨尔本大学,通过Lidar谈论自动驾驶。鉴于大多数人认为大多数人都有自动驾驶车辆,虽然实际上有五个层次的自主驾驶,但自动驾驶的自主驾驶仍然存在争议仍然存在争议,尽管有五个层次的自动驾驶,但在不可能在不久的将来广泛实施的所有条件下自动驾驶。人为错误有助于94%的道路事故,驾驶自动化可以直接解决这一问题,导致更安全的道路,改善交通流量,减少排放和改善具有特殊需求的人的流动性。LIDAR可以帮助驾驶现场感知,发电高清晰度地图和车辆定位,并且在不同的天气条件下更准确,而不是相机,由此可以使用恶劣天气来产生安全性和性能问题。
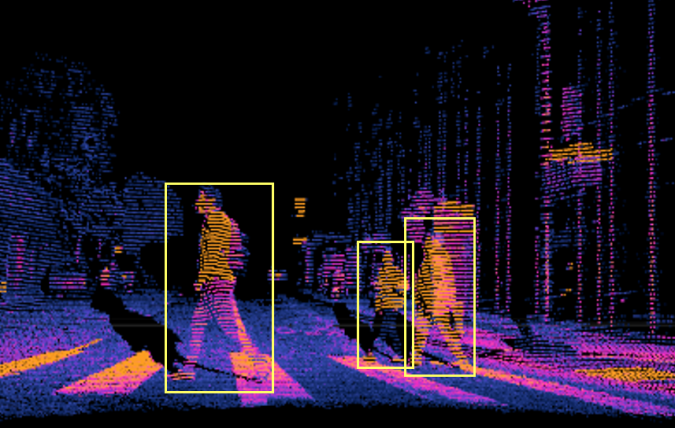
先进的机器学习模型由人工标记的数据训练,当部署时,可以识别和定位道路环境中的物体。基于激光雷达和相机结合的机器学习的准确率远高于98%以上的单独方法。对标注数据的需求是在更大尺度上对点云进行分类以生成详细的道路环境3D地图的挑战。另一个挑战是不同环境下的场景适应性和可转移性,因为不同城市和国家的道路环境不同。机器学习是开启未来自动驾驶汽车全部潜力的关键。
目前,利用航空测量数据建立三维城市模型的前沿正在形成,通过这些新方法可能实现的保真度、准确性和细节水平,使其成为我们领域最令人兴奋的领域之一。我们鼓励读者喝杯咖啡,坐下来,享受这个网络研讨会YouTube请联系马科斯·马丁内斯EEASI有任何问题或更多信息:info@eaasi.eu.